[frame src=“http://www.htw-mechlab.de/wp-content/uploads/2013/10/Citroen_C6_EGas_Systemaufbau.png“ width=“IMAGE_WIDTH“ height=“IMAGE_HEIGHT“ lightbox=“on“ title=“IMAGE_TITLE“ align=“left“ ]
Hintergrund
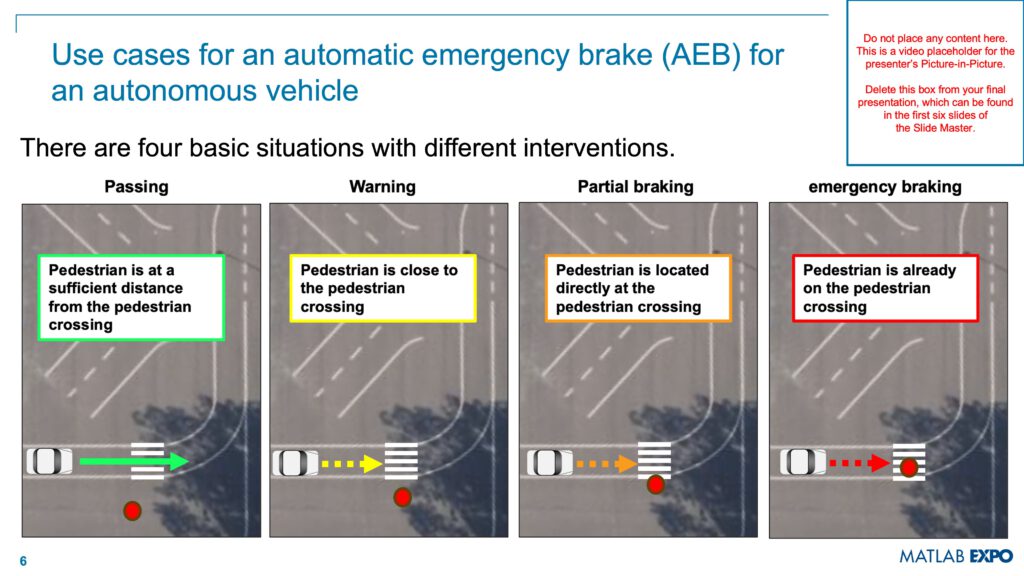
Bei realen Messfahrten ist es oft wünschenswert, dass ein vorgegebener Geschwindigkeitsverlauf möglichst exakt und bei wiederholenden Versuchen gleichermaßen nachgefahren wird, um somit reproduzierbare Versuchsbedingungen zu gewährleisten. Aus diesem Grund erfolgte die Entwicklung eines embedded systems bestehend aus einem Steuergerät (FlexDevel) und einem Hardwaremodul zur Generierung äquivalenter Spannungssignale für eine autonome Ansteuerung des elektronischen Gaspedals (EGas) am Versuchsträger Citroen C6. Dadurch können im Bezug auf die Längsführung des Fahrzeugs reproduzierbare Bedingungen für die Fahrzustände Beschleunigen und Konstantfahrt erreicht werden. Die Messwerte werden dann nicht mehr vom Fahrer durch die manuelle Betätigung des Gaspedals beeinflusst und liefern so für die Auswertung vergleichbarere Ergebnisse. Beispielsweise könnte man dieses System zum Nachfahren eines Geschwindigkeitszyklus (v-t-Verlauf) auf einem Rollenprüfstand einsetzen.
Beschreibung des Ausgangszustandes am Citroen C6
Der Citroen C6 verfügt über eine Automatikschaltung und ein elektronisches Gaspedal, das als eine Einheit bestehend aus Pedal mit Kickdownschalter und zwei induktiven Drehwinkelgebern ausgestattet ist. Über einen speziellen Stecker, der aus vier Pins besteht, werden die Signale zwischen Gaspedal und Motorsteuergerät übertragen. Dieser Stecker wird für die Systemintegration genutzt und ermöglicht einen leichten Ein- und Ausbau der Systemkomponente (Hardwaremodul), so dass der Ausgangszustand jederzeit wieder vollständig hergestellt werden kann. Bei der Analyse dieser Steckverbindung stellt sich heraus, dass zwei Pins für die beiden induktiven Drehwinkelgeber vorgesehen sind. In Abhängigkeit des Pedalwinkels werden von den Sensoren entsprechende Spannungssignale ausgegeben. Die anderen beiden Pins übertragen die Potentiale 5 V und 0 V.
Kennlinien des elektronischen Gaspedals
Zunächst werden die beiden Kennlinien des EGas am Versuchsfahrzeug aufgenommen, um später die passenden äquivalenten Spannungssignale durch das embedded system erzeugen zu lassen. Es ergaben sich die folgenden linearen Verläufe.
[frame src=“http://www.htw-mechlab.de/wp-content/uploads/2013/10/Kennlinie_EGas.png“ width=“IMAGE_WIDTH“ height=“IMAGE_HEIGHT“ lightbox=“on“ title=“IMAGE_TITLE“ align=“left“ ]
Die beiden Kennlinien unterscheiden sich im Anstieg und y-Achsenabschnitt.
Systembeschreibung
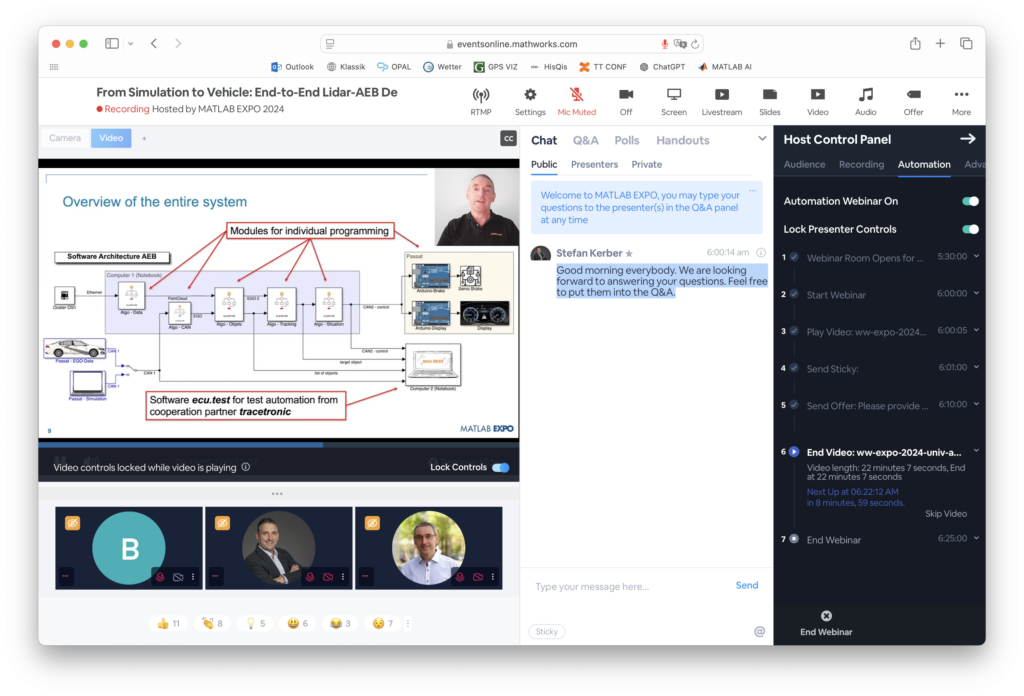
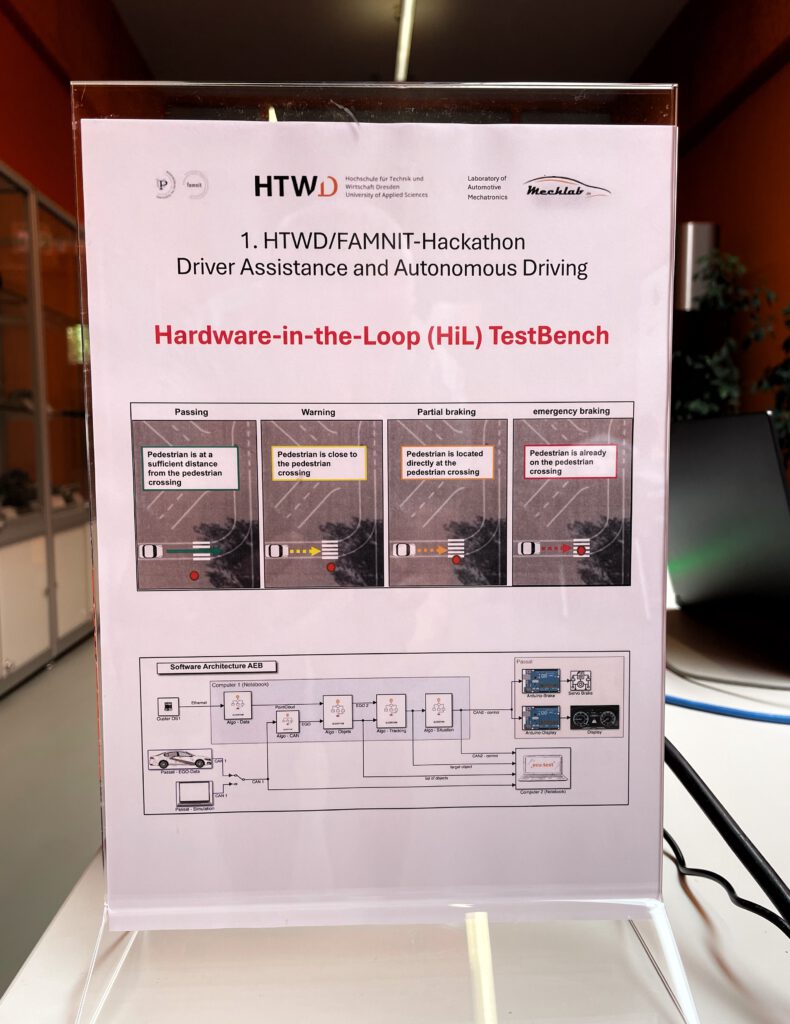
Einen Überblick über die Verknüpfung der einzelnen am System beteiligten Komponenten erhält man aus der folgenden Abbildung.
[frame src=“http://www.htw-mechlab.de/wp-content/uploads/2013/10/Systemaufbau.png“ width=“IMAGE_WIDTH“ height=“IMAGE_HEIGHT“ lightbox=“on“ title=“IMAGE_TITLE“ align=“left“ ]
Zur Generierung der Spannungssignale in Abhängigkeit der Gaspedalstellung (siehe obiges Diagramm) wird das Entwicklungssteuergerät FlexDevel eingesetzt. Dieses verfügt u.a. über zwei CAN-Schnittstellen, von denen eine zur Übermittlung des Gaspedalwertes verwendet wird und über vier PWM Ausgänge mit DC-Filter, so dass hierüber zwei analoge Spannungssignale im Bereich von 0 bis 5V bereitgestellt werden können. Diese Signalquellen sind allerdings nicht belastbar und werden durch Operationsverstärker (Invertierende Verstärker, Impedanzwandler), die im sogenannten Hardwaremodul verbaut sind, an die erforderlichen Spannungspegel angepasst und belastbar gemacht.
Des Weiteren ist am Hardwaremodul ein Schalter vorgesehen, über den ein Relais geschaltet wird. Demnach werden entweder die originalen Spannungssignale des EGas vom Citroen C6 oder die generierten Spannungssignale ausgegeben. Ein manuelles Fahren wird dadurch auch bei verbautem System ermöglicht und in kritischen Situationen kann das System durch den Schalter deaktiviert werden.
Durch die Verwendung eines CANcase und der „Embedded Target for Motorola MPC555 library“ aus Simulink wird eine CAN Kommunikation des Notebooks mit dem Fahrzeug-CAN und einem zweiten CAN aufgebaut. Vom Fahrzeug-CAN werden die Signale: Geschwindigkeit, Gang, Bremslichtschalter und Bremsdruck eingelesen. Der zweite CAN dient zur Übertragung des Gaspedalwertes an das Entwicklungssteuergerät.
Geschwindigkeitsregelung durch Gaspedalstellung
Zur Regelung der Geschwindigkeit wurde ein PI-Regler in einem Simulinkmodell implementiert.
[frame src=“http://www.htw-mechlab.de/wp-content/uploads/2013/10/Simulinkmodell_PI_Regler.png“ width=“IMAGE_WIDTH“ height=“IMAGE_HEIGHT“ lightbox=“on“ title=“IMAGE_TITLE“ align=“left“ ]
Die Eingangs- bzw. Ausgangsgrößen sind rot bzw. grün dargestellt. Aus der Istgeschwindigkeit des Fahrzeugs und der Sollgeschwindigkeit (die beispielsweise aus einem Fahrzyklus kommt) wird die Regeldifferenz berechnet. Diese wird im P-Anteil (proportionaler Anteil) mit einer Konstanten (Kp) multipliziert und auf einen bestimmten Wertebereich begrenzt. Im I-Anteil (integraler Anteil) wird die Regeldifferenz unter bestimmten Voraussetzungen mit einer Konstanten (Ki) multipliziert und über diskrete Zeitabstände aufsummiert. Beide Regleranteile werden abschließend addiert, auf einen Wert zwischen 0 und 100 begrenzt und ausgegeben, falls kein Unterbrechungssignal vorliegt. Eine Unterbrechung liegt bei eingelegtem Rückwärtsgang, Neutral- oder Parkstellung, sowie bei betätigter Bremse vor. In dem Fall wird die Gaspedalstellung 0 ausgegeben.
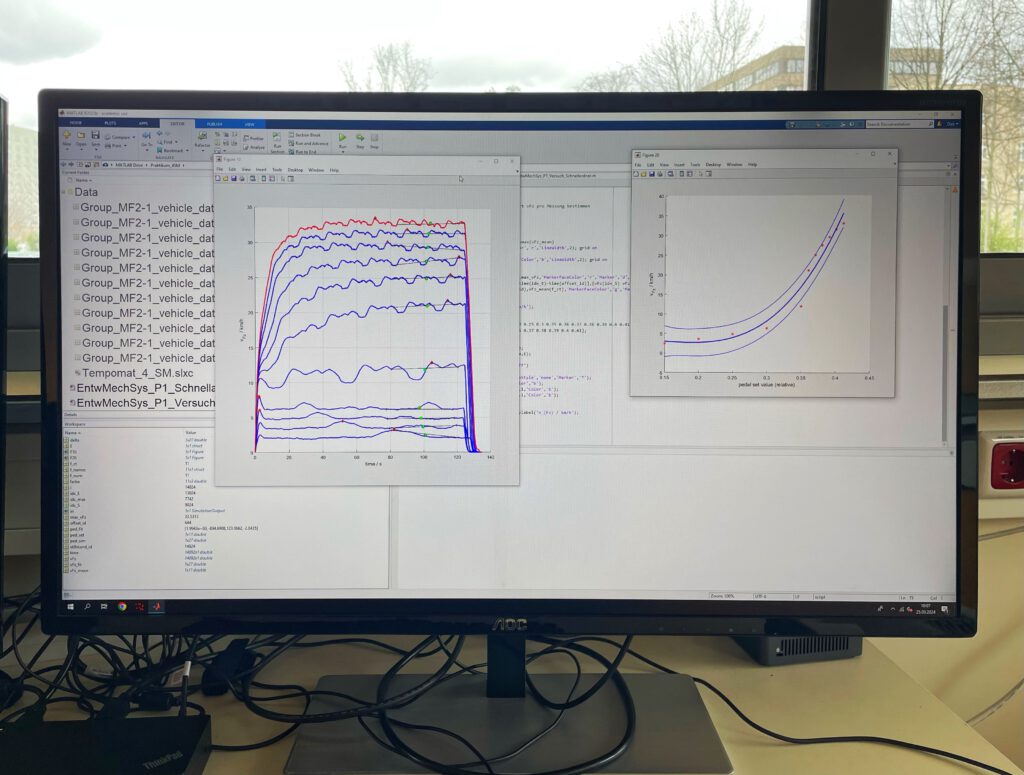
Versuchsreihen
Da das System natürlich nicht auf der realen Straße eingesetzt werden darf, wurde die Funktionsweise auf einem Rollenprüfstand getestet. Dazu wurden rampen- und sprungartige Geschwindigkeits-Zeit-Verläufe vorgegeben und durch das neue System autonom nachgefahren. Die Überstimmung des autonomen Gaspedals durch eine Betätigung der Fußbremse wird ebenfalls aufgezeigt. Die nachfolgenden drei Abbildungen bestätigen eine korrekte Funktionsweise.
[frame src=“http://www.htw-mechlab.de/wp-content/uploads/2013/10/Rampenvorgabe.png“ width=“IMAGE_WIDTH“ height=“IMAGE_HEIGHT“ lightbox=“on“ title=“IMAGE_TITLE“ align=“left“ ]
[frame src=“http://www.htw-mechlab.de/wp-content/uploads/2013/10/Sprungvorgabe.png“ width=“IMAGE_WIDTH“ height=“IMAGE_HEIGHT“ lightbox=“on“ title=“IMAGE_TITLE“ align=“left“ ]
[frame src=“http://www.htw-mechlab.de/wp-content/uploads/2013/10/Bremsbetätigung.png“ width=“IMAGE_WIDTH“ height=“IMAGE_HEIGHT“ lightbox=“on“ title=“IMAGE_TITLE“ align=“left“ ]