Zur Initiierung eines neuen Projektes für autonome Shuttles wurden am 21.07.2026 Messungen mit zahlreichen Sensoren durchgeführt. Das Mechlab-Team beteiligte sich mit einem Lidar vom Typ Ouster OS1-64. Ein kurzer Ausschnitt zeigt die Herausforderungen für autonome Fahrzeuge auf dem Uni-Campus. Wenn alle Daten ausgewertet sind, gibt es einen ausführlichen Bericht.
Vielen Dank an die Teams von Prof. Raffaela Cefalo (Universität Triest) und Prof. Polona Pavlovčič Prešeren (Universität Ljubljana) für die sehr gute Zusmmenarbeit.
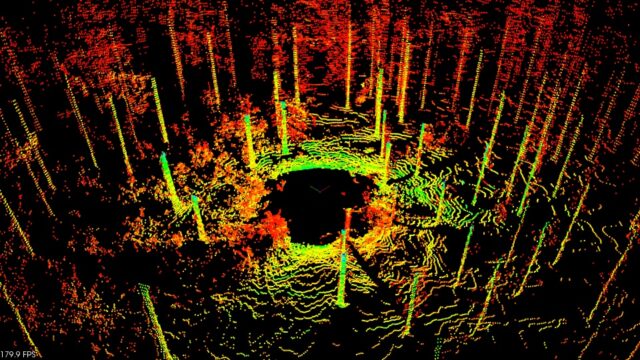
Im Video ist die 3D-Punktwolke dargestellt (unten rechts). Oben zu sehen ist das IR-Bild der Umgebung, das beim Ouster automatisch mit erstellt wird und wichtige Zusatzinformationen zur Abstandsmessung liefert. Das Video (links) dient nur zur Dokumentation und wird nicht ausgewertet.
To launch a new project involving autonomous shuttles, measurements using various sensors were conducted on July 21, 2026. The Mechlab team participated using an Ouster OS1-64 LiDAR sensor. A brief excerpt illustrates the challenges autonomous vehicles face on the university campus. A detailed report will be available once all the data has been analyzed.
Many thanks to the teams led by Prof. Raffaela Cefalo (University of Trieste) and Prof. Polona Pavlovčič Prešeren (University of Ljubljana) for the excellent collaboration.
The video displays the 3D point cloud (bottom right). Shown at the top is the infrared (IR) image of the surroundings; this is automatically generated by the Ouster sensor and provides valuable additional information for distance measurement. The video on the left serves solely for documentation purposes and is not being analyzed.