In der letzten Vorlesungswoche 2025 konnte der neue Praktikumsversuch im 3. Semester erfolgreich beendet werden.
Dabei geht es um mehrere Prüfungen bei einer kurzen Testfahrt, die im Rahmen der periodischen Hauptuntersuchung Aufschlüsse über Fahrwerk und Bremse geben sollen. Um die Datenbank der FSD Fahrzeugsystemdaten GmbH systematisch zu erweitern, wurden 4 verschiedene Testabschnitte eingerichtet.Nachdem zunächst alle Studierenden mit dem Skoda Enyaq den Test absolviert hatten, gab es drei Studierende, die ihre Privatfahrzeuge testen wollten. Vielen Dank an dieser Stelle für die Bereitstellung.
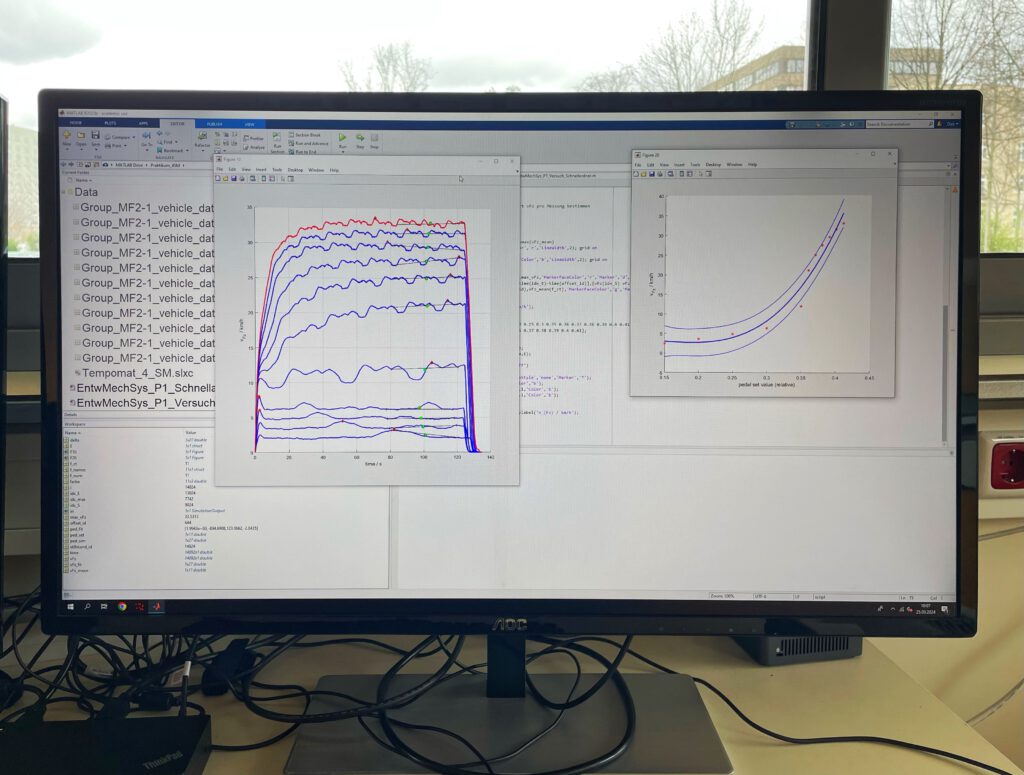
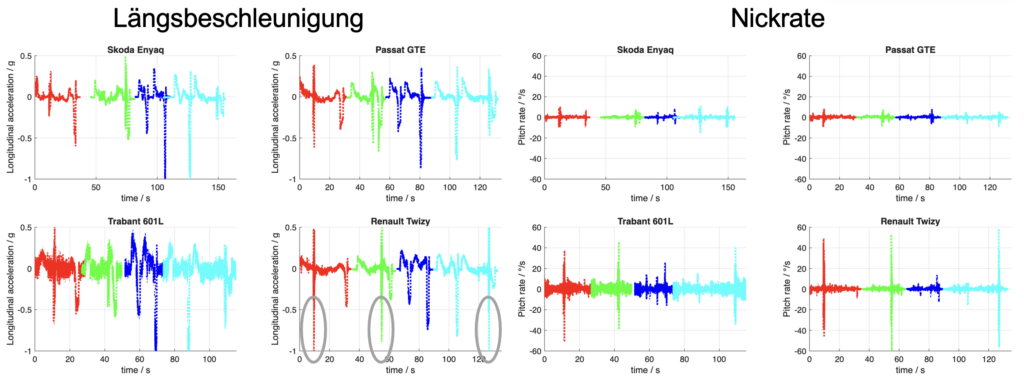
Ein erster Vergleich für 4 Fahrzeuge zeigt die deutlichen Unterschiede im Fahrverhalten. Bemerkenswert ist, dass beim Renault Twizy bei der Schwellenüberfahrt eine Verzögerung auftritt, die einer Vollbremsung entspricht (markierte Bereiche). Auch die Nickrate gibt Aufschluss über das Fahrverhalten. Auch hier zeigt der Renault Twizy wenig „Dämpfung“, dicht gefolgt vom Trabant 601L.
In the last week of lectures in 2025, the new practical exercise for third-semester students was successfully completed.
This involved several tests during a short test drive, designed to provide information about the chassis and brakes as part of the periodic vehicle inspection. To systematically expand the database of FSD Fahrzeugsystemdaten GmbH, four different test sections were set up.After all students initially completed the test with the Skoda Enyaq, three students wanted to test their own private vehicles. Many thanks to them for providing their cars. An initial comparison of the four vehicles reveals significant differences in driving behavior. It is noteworthy that the Renault Twizy exhibits a deceleration when crossing a speed bump that is equivalent to a full emergency stop (marked areas). The pitch rate also provides information about the driving behavior. Here too, the Renault Twizy shows little „damping“, closely followed by the Trabant 601L.

Besonders hervorzuheben ist, dass bei diesem Test alle Fahrzeuge gleich behandelt werden.
It is particularly noteworthy that all vehicles are treated equally in the test.










Alle Versuchsfahrzeuge // All test vehicles