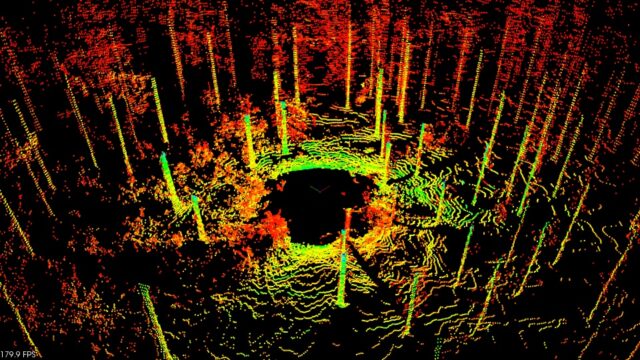
Zur Initiierung eines neuen Projektes für autonome Shuttles wurden am 21.07.2026 Messungen mit zahlreichen Sensoren durchgeführt. Das Mechlab-Team beteiligte sich mit einem Lidar vom Typ Ouster OS1-64. Ein kurzer Ausschnitt zeigt die Herausforderungen für autonome Fahrzeuge auf dem Uni-Campus. Wenn alle Daten ausgewertet sind, gibt es einen ausführlichen Bericht. Vielen Dank an die Teams von Prof. Raffaela Cefalo (Universität Triest) und Prof. Polona Pavlovčič Prešeren (Universität Ljubljana) für die sehr gute Zusmmenarbeit. Im Video ist die 3D-Punktwolke dargestellt (unten rechts). Oben zu sehen ist das IR-Bild der Umgebung, das beim Ouster automatisch mit erstellt wird und wichtige Zusatzinformationen zur Abstandsmessung liefert. Das Video (links) dient nur zur Dokumentation und wird nicht ausgewertet.
To launch a new project involving autonomous shuttles, measurements using various sensors were conducted on July 21, 2026. The Mechlab team participated using an Ouster OS1-64 LiDAR sensor. A brief excerpt illustrates the challenges autonomous vehicles face on the university campus. A detailed report will be available once all the data has been analyzed. Many thanks to the teams led by Prof. Raffaela Cefalo (University of Trieste) and Prof. Polona Pavlovčič Prešeren (University of Ljubljana) for the excellent collaboration. The video displays the 3D point cloud (bottom right). Shown at the top is the infrared (IR) image of the surroundings; this is automatically generated by the Ouster sensor and provides valuable additional information for distance measurement. The video on the left serves solely for documentation purposes and is not being analyzed.
Im Jahr 2024 gab es einen neuen Rekord bei den internen Mechlab-Abschlussarbeiten (aktuell immer noch zum Dipl.-Ing. (FH)). Sieben Männer und eine Frau konnten erfolgreich ihre Arbeiten verteidigen und dürfen damit künftig diesen akademischen Grad tragen. Die Themen reichen dabei von der Bewertung von Lidar-Detektionen bis zur Auswertung von Unfalldaten. Alle Arbeiten sind frei verfügbar (in deutscher Sprache).
In 2024, there was a new record for internal Mechlab theses (currently still for Dipl.-Ing. (FH)). Seven men and one woman were able to successfully defend their theses and will thus be allowed to use this academic degree in the future. The topics range from the evaluation of lidar detections to the analysis of accident data. All theses are freely available (in German).
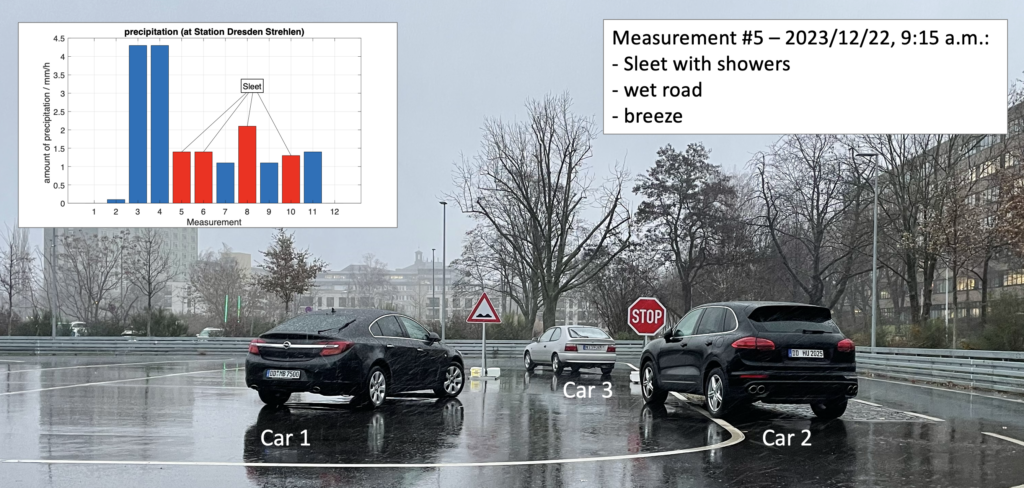
Lidar-Sensorik wird sehr stark durch die Witterung beeinflusst. In einer eigenen Untersuchung werden verschiedene Witterungseinflüsse untersucht. Dabei wurde auch die in Österreich für systematische Untersuchungen eingerichtete Teststrecke der Firma Digitrans genutzt. Die Messdaten sind auf Anfrage verfügbar (trautman@htw-dresden.de).
Lidar sensors are strongly influenced by the weather. A separate study investigated various weather influences. The test track set up by the company Digitrans in Austria for systematic investigations was also used. The measurement data are available on request (trautman@htw-dresden.de).
Beispiel für eine Auswertung // Example of an evaluation
Mitte März 2024 erfolgte die erste interne Projektvorstellung bei tracetronic. Zahlreiche Mitarbeitende informierten sich über die Ziele der Kooperation, den aktuellen Stand und die nächsten Schritte. In der ausführlichen Diskussion wurden zahlreiche Anregungen für Erweiterungen und Anwendungsfälle gegeben.
The first internal project presentation at tracetronic took place in mid-March 2024. Numerous employees found out about the goals of the cooperation, the current status and the next steps. In the detailed discussion, numerous suggestions for extensions and use cases were given.
Die Arbeitsgruppe „Virtual System Development“ des Fraunhofer-Instituts IIS/EAS führte in KW 7 erste Versuche mit ihrer Messtechnik auf dem HTWD-Prüffeld erfolgreich durch. Es wurden verschiedene Szenarien aus dem urbanen Bereich mit dem Umfeld-Modul des Institutes aufgenommen. Eine erste Auswertung zeigt die Leistungsfähigkeit der Sensorik und der zugehörigen Erkennungssoftware. Ansprechpartner für weitere Informationen ist Gruppenleiter Dr. Christoph Sohrmann.
Der Kontakt zur Arbeitsgruppe entstand auf der VDI-Tagung Umfelderfassung im November 2023. Danach wurde eine Zusammenarbeit zwischen dem Institut, der HTW Dresden (Mechlab) und der Firma tracetronic vereinbart. Der Testlauf auf dem Prüffeld war hierbei nach gegenseitigen Besuchen die erste konkrete Umsetzung. Nachfolgend zu sehen sind einige Impressionen der Datenaufnahme sowie eine erste Auswertung (Rohdaten und Objekterkennung).
The „Virtual System Development“ working group of the Fraunhofer Institute IIS/EAS successfully carried out the first tests with their measurement technology on the HTWD test field in week 7. Various scenarios from the urban area were recorded using the institute’s environment module. An initial evaluation shows the performance of the sensors and the associated detection software. The contact person for further information is group leader Dr. Christoph Sohrmann.
Contact with the working group arose at the VDI “Environmental Perception” conference in November 2023. A collaboration was then agreed between the institute, HTW Dresden (Mechlab) and the company tracetronic. The test run on the test field was the first activity after mutual visits. Below you can see some impressions of the data recording as well as an initial evaluation (raw data and object recognition).
Video der Rohdaten // Video of raw dataVideo der Objekterkennung // Video of object detections
Mit dem Ziel zukünftige forsttechnische Maschinen zu automatisieren, soll der Baumbestand von Rückegassen über einen Lidar erkannt und als Referenz zur Positionierung verwendet werden. Im Rahmen einer Bachelorarbeit wurden drei Gassen im Tharandter Wald exemplarisch ausgewählt und mit einen Laserscanner (Ouster OS1) vermessen. Zur Bewertung der Messungen wurde der Baumbestand entlang der Gasse über ein Tachymeter vermessen.
Erfassung der Rückegasse über den Ouster OS1 Lidar sowie Erfassung der Position über ein Leica Rover System
Punkdaten des Ouster OS1
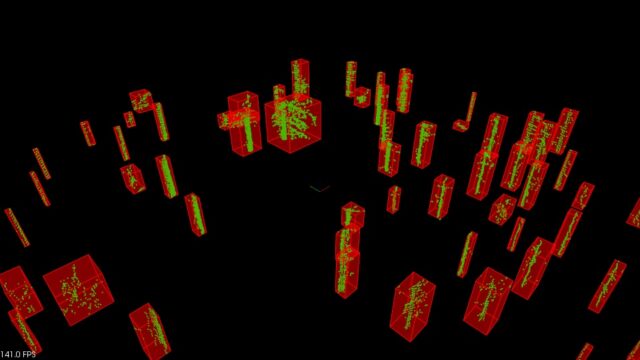
Die Punktdaten des Lidar wurden über eine Cropbox und anschließender Filterung (Voxel, Statistical-Outlier-Removal) reduziert. Über einen RANSAC wurde der Untergrund entfernt. Das anschließende Clustern erfolgte über einen euklidischen Ansatz. Als Ergebnis ist der Baumbestand als Bounding Box dargestellt.
Segmentierte Punktwolke und Darstellung des erkannten Baumbestandes als Bounding Box
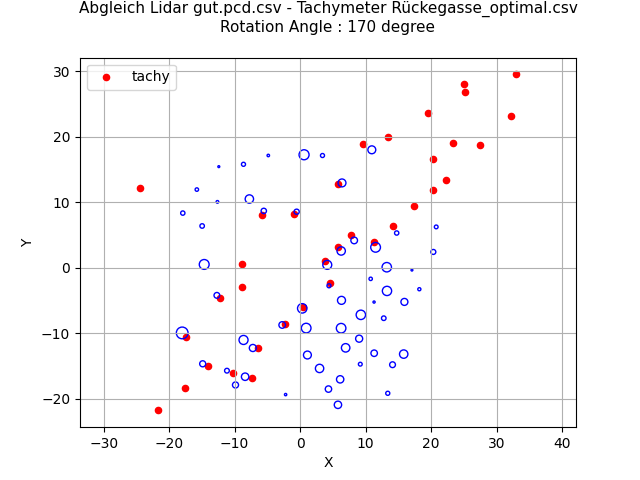
Final können die Objekte des Lidar mit den Daten des Tachymeter verglichen und bewertet werden.
Darstellung der Lidar Objekte und der georeferenzierten Daten des Tachymeter
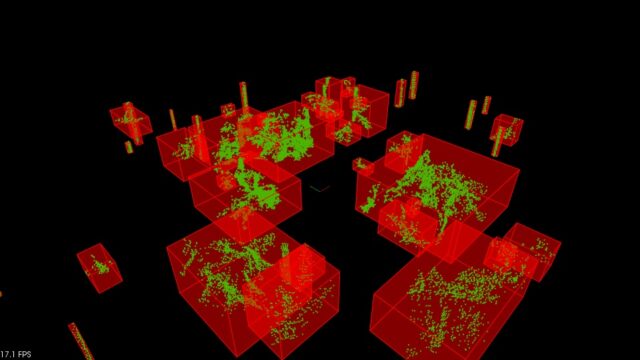
Der Baumbestand in lichten Rückegassen wird sehr gut über das Verfahren erkannt. Eine Positionierung und Navigation von automatisierten Forstfahrzeugen wäre unter diesen Bedingungen und mit der Verwendung eines Lidar möglich. Weniger erfolgreich ist dieser Ansatz bei einem dichten Baumbestand. An dieser Stelle versagen die einfachen Methoden der Punktdatensegmentierung. Hier sind neue Ansätze und ergänzende Technologien gefragt.
Objekterkennung in einem dichten Baumbestand. Durch die Belaubung können die Baumstämme nicht erkannt werden. Die Genauigkeit zur Positionierung eines automatisierten Forstfahrzeuges ist unter diesen Bedingungen nicht gegeben.
We visited ZalaZONE late November this year. It is located in Zalaegerszeg, Hungary, one hour east of the Austrian-Hungarian border. With about 260 ha of space the ZalaZONE test ground provides test oppertunities and facilities for the testing of a wide range of future mobility concepts. Though a lot of the test ground is still „work-in-progess“, within our cooperation with ZalaZONE we were granted access to establish some test sequences on the completed testsections.
Following measurements were recorded on November 28th with mostly poor weather conditions (cloudy, occasional light to heavy rain). The measurements took place in different designated areas of the testground. The following interpretation discusses general effects, problems and characteristics of the lidar pointcloud(s) and partly introduces and discusses the testfield area in use.
The hardware being used consits mainly of some of the following parts:
In general both lidarscanners output a cloud of points, where each point is given not only with standard x,y,z position attributes, but also with such as intensity information for each point. This value is a very good possibility for filtering and interpretation as values of important street environment facilities are equipped with a retroreflective surface, thus reflecting a higher amount of light back to the laserscanner than nature would usually allow in a common diffuse reflection. A heatmap-like colored pointcloud is used to visualize the intensity of returned points. The colder the colour, the higher the value of given point.
A rudimentary map is imported into the visualizer. This is directly taken from a section defined and exported from OpenStreetMaps: see ZalaZONE at OpenStreetMaps here.
Dynamic Platform Measurement
The following test is recorded at the dynamic platform as part of ZalaZONEs testground. For more information about the different sections see here.
The measurement at this section was setup as follows: Half way up the access stretch there is a RSU set-up, supposed for communication with the vehicle’s OBU, as well as there is a retroreflective section (1m) of lanemarker (provided by 3M) put out on the right side of the road, overlaying the usual lanemarkings (see figure below). Only the Velodyne VLP-16 is running in this test, therefore there isn’t such a high resolution given between laserscan layers.
Some of the recorded data:
gps positions of RSU and vehicle
pointcloud data
video data
communication RSU <–> OBU
Measurement starts at the far end of the access stretch to the dynamic platform passing the RSU and M3’s lanemarker strip halfway down the stretch and continuing on to the free space of the dynamic platform. Returning to the starting spot afterwards (see video below).
Goals are the evaluation of communication aspects (such as signal strength) between RSU & OBU and the investigation of pointcloud behaviour.
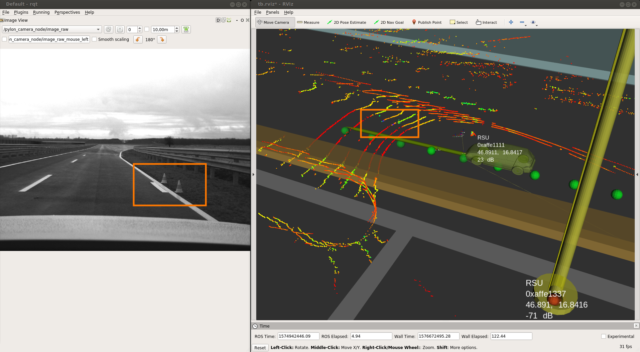
Fig. I: moment of approach
This snapshot shows the car at the moment of approach to the prepared lanemarker. The usual (standard) lanemarkings on the left and right of the lane are not retroreflective (colored red to orange, thus poor return value) in opposite to the prepared lanemarker: it’s value is very high and separates clearly from the ground around (indicated with green to blue color).
Fig. II: video and lidar visualization
This video shows the vehicle moving along the straight, passing the RSU and lanemarker onto the platform section. Important to mention here is the absence of lidar information of the street ahead and furthermore as soon as we are level with the platform section, there is no information (no points) to the right of the vehicle retrieved from the laserscanner. This is to be explained with the bad weather conditions on site. The wet surface of the street causes a total reflection of the light beams sent out.
Smartcity Measurement
This test is recorded at the Smart City Zone as part of ZalaZONEs testground. For more information about the different sections see here.
The hardware in use corresponds with the former setup, additionally the Ouster Lidar is in use as well.
Fig. III: top view of smart city ride
The RSU is set up on the bottom right, close to the starting point of the measurement, collected data corresponds to the data from the former measurement. Here again the pointcloud behaviour is targeted as well as the communication aspects.
The measurement procedure has the vehicle driving along the bottom of the map section, taking a right turn and doing a u-turn at the end of the street to take the way back. During this, a mixed driving profile with acceleration and deceleration at speeds ranging from 10-50 km/h is executed.
Fig. IV: smart city; view following
Street signs are well recognizable via intensity filtering (cold coloured points) of the pointcloud. The none-retroreflective (standard) lanemarkings are human-recognizable, but it’s hard to find a threshold as value differences compared to the street are not that significant. Still we retrieve more information from our surrounding environment as weather conditions are getting better and the street is not as wet as was with the former measurement.
An outgoing DENM is visualized as a pylon-texture during the ride around the section. In this case an aggressive deceleration leads to the output of this message. It is broadcasted to the surrounded vehicles.
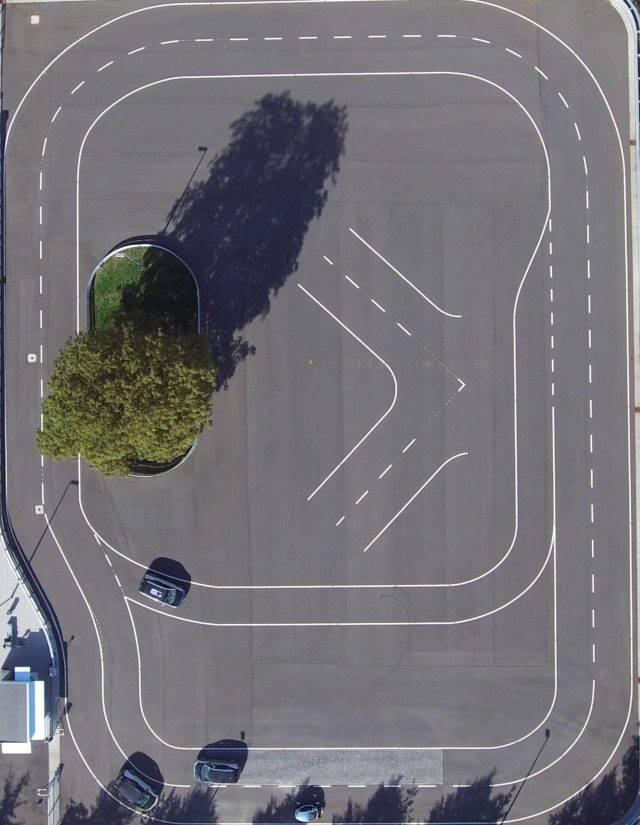
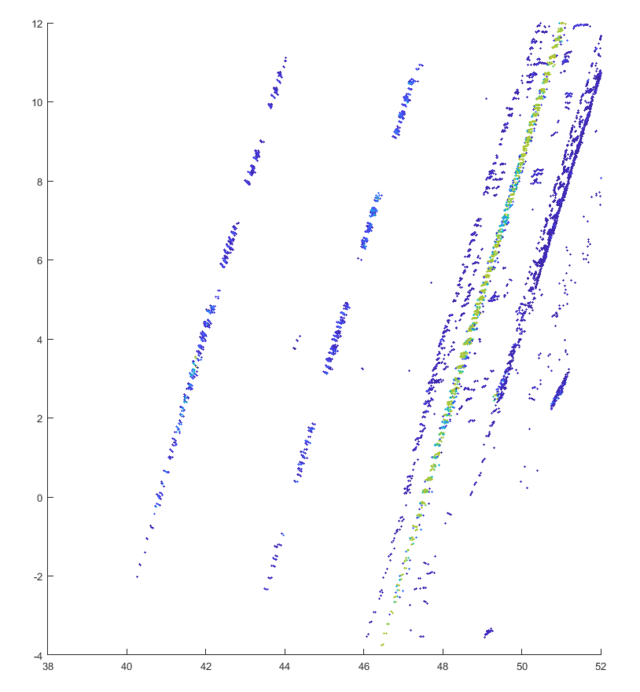
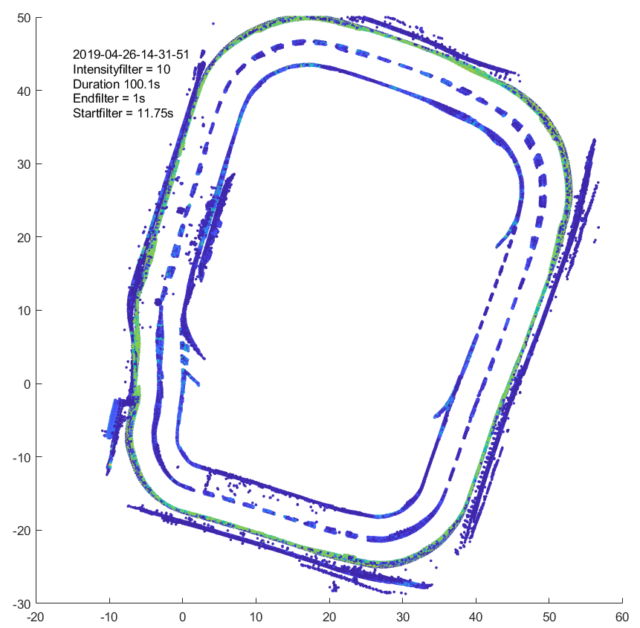
Am 26.04.2019 starteten die Tests der retroreflektierenden und kontrastverstärkten Fahrspurmarkierungen der Firma 3M im 2-Wochen Rhythmus. Zuerst werden Messungen der ungereinigten Markierung mit einem Laserscanner durchgeführt. Nach einer Reinigung mit der bereitgestellten Kehrmaschine aus dem Projekt EBALD wird eine weitere Messung durchgeführt. Außerdem gab es bisher eine Vergleichsmessung unter leichtem Regen als Zusatzmessung.
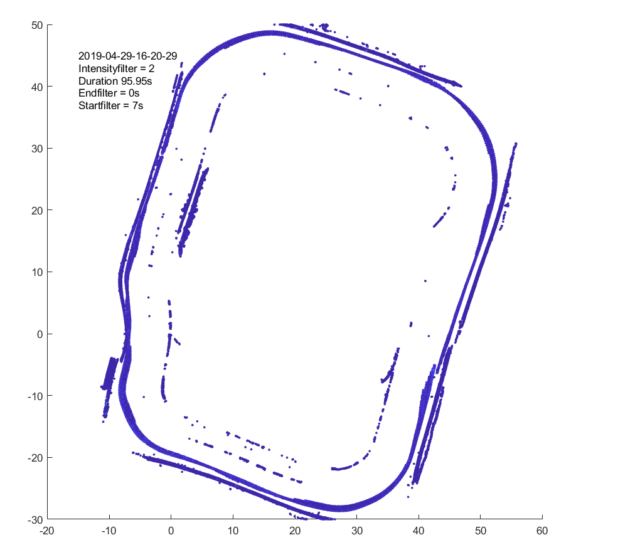
Bild 1: Testfeld Ansicht von oben
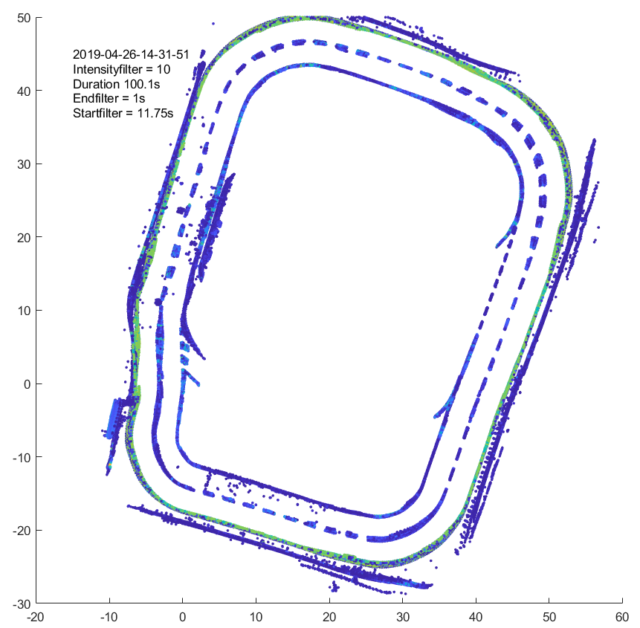
Bild 2: 1. Messung
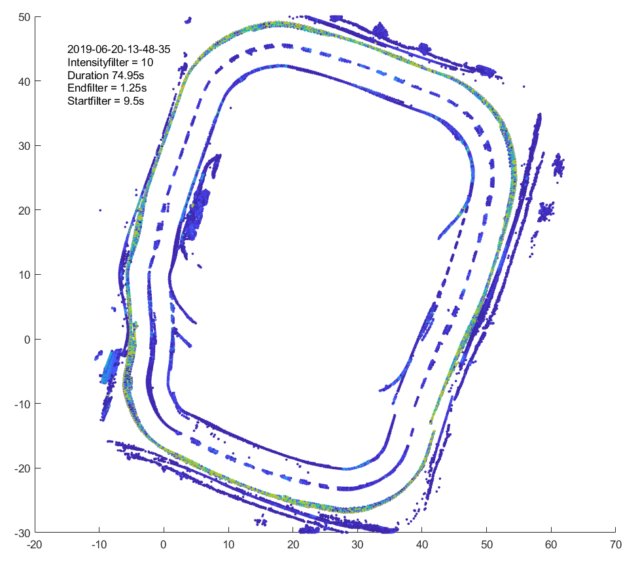
Die Farbe spiegelt die Intensität der Datenpunkte des Laserscanners dar, von blau für weniger intensiv bis orange für intensiver. Das Koordinatensystem ist auf dem Testfeld angelegt. Die Positionierung über die die gewonnen Laserdaten aufgetragen werden erfolgt über eine Sensordatenfusion mit extended Kalman-Filter. Daher kommen auch Ungenauigkeiten in der Transformation der Punkte auf das Testfeld. Die verbesserte äußere Fahrspur ist im Vergleich zur inneren deutlich gelber zu erkennen. Die zweite blaue Punktlinie am äußeren Rand stammt von den Banden rund um das Prüffeld (2).
Untersuchte Einflüsse
Verschmutzung
Im Laufe des Frühlings kam es vor allem zu starken Blütenanlagerungen durch die Bäume auf und in der Nähe der Markierungen (5-8). Dabei ist besonders anzumerken, dass durch die Anrauhung eine erhöhte Verschmutzung auf den neuen Markierungen festzustellen ist. Auch wenn hier die Schrägung des Testfeldes berücksichtigt werden sollte, die den Effekt verstärkt. Die Säuberung wird mit einer einmaligen Fahrt vorgenommen, um nicht zu sehr von Realbedingungen abzuweichen. Beide Markierungen können gleich gut gereinigt werden.
Bild 3: Laserdaten vor Reinigung
Bild 4: Laserdaten nach Reinigung
Bild 5: Sehr starke Blütenverschmutzung
Bild 6: Fahrspurmarkierung nach Reinigung
Bild 7: Leichte Verschmutzung
Bild 8: Fahrspurmarkierung nach Reinigung
Bild 9: Laserdaten nach Reinigung
Bild 10: Laserdaten vor Reinigung
Bei der vollständigen Überdeckung ist die Intensität logischerweise stark verringert (3), außerdem sind die Punkte zerstreut. Nach der Reinigung stellt sich der Normalzustand ein (4). Bei der leichten Verschmutzung sind die gleichen Effekte, allerdings in deutlich geringerem Ausmaß, zu beobachten (10). Trotz der stärkeren Verschmutzung liefert hier die neue Markierung immer noch bessere Daten als die herkömmliche.
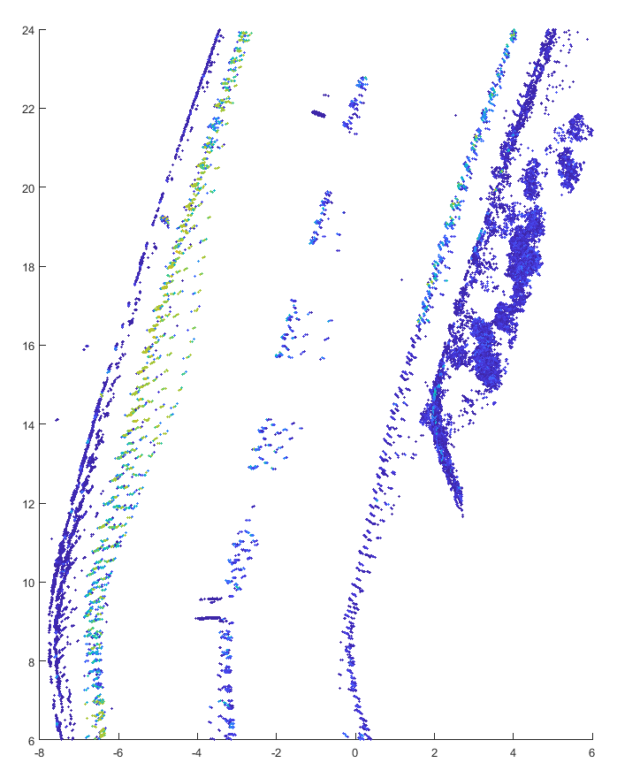
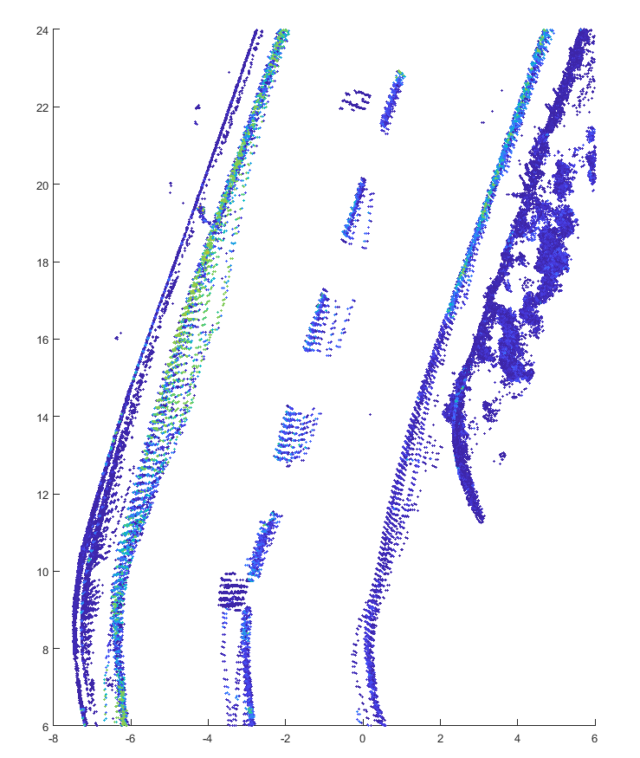
Regen
Der Einfluss durch Regen ist die größte Stärke im Vergleich zu herkömmlichen Fahrspurmarkierungen.
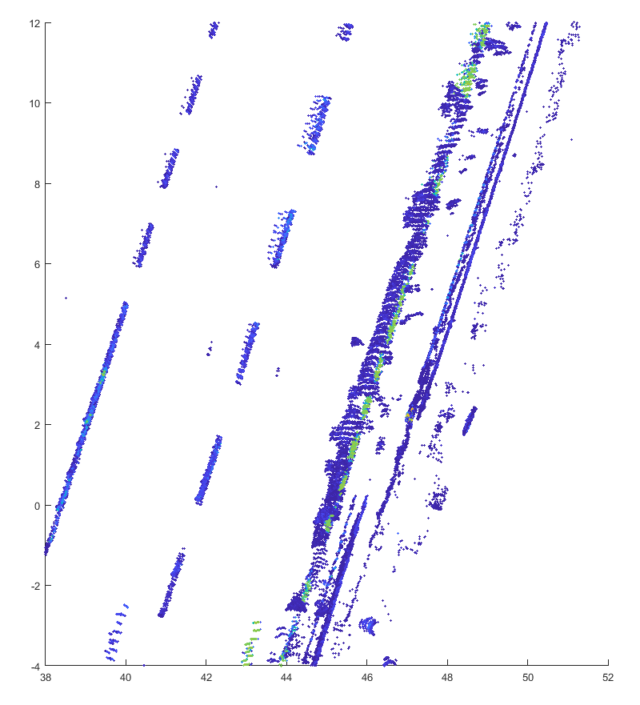
Bild 11: Regenmessung 29.04.19
Bild 12: Regenmessung 29.04.19
Bild 13: Regenmessung 29.04.19
Im Bild ist deutlich zu sehen, dass trotz eines verringerten Intensitätsfilters bei leichter Feuchte die innere Markierung kaum zu sehen ist (11). Auch die Intensität der speziellen Markierung ist verringert, aber noch deutlich auszumachen. Hierbei bewältigt die neue Fahrspurtechnologie das Problem von Lidar mit feuchter Straße sehr gut.
Beschädigung
Der bis jetzt am geringsten zu spürende Einfluss, ist die Verminderung der Reflektivität durch die regelmäßige Belastung auf die Markierungen durch die Metallborsten der Kehrmaschine. Nach 4 Reinigungen ist kein Unterschied zu erkennen. (Vgl. 14 und 15)
Bild 14: 1. Messung ungereinigt
Bild 15: 5. Messung, 4 Reinigungen später
Allerdings kam es bereits zu leichten Ablösungen und Fadenziehen an den Übergangsstellen. (16-20)
Die retroreflektierenden Fahrspurmarkierungen erfüllen ihren Zweck gut und halten den Belastungen im Allgemeinen stand. Sie verbessern die wahrgenommene Intensität durch Lidar deutlich. Allerdings sind die Probleme mit dem bisherigen Einzelfall der sehr starken Verschmutzung und der Beschädigung weiter im Auge zu behalten.
Nach der Testphase auf dem Prüffeld werden die Tests auf der B170 fortgesetzt.
Im Rahmen des Forschungsprojektes „NIVES“ wird die Nutzung und Fusion verschiedener Sensoriken am Fahrzeug zur teils vollständigen Automatisierung von Fahrfunktionen untersucht. Dabei ist eine detaillierte Erfassung der Umgebung von besonderer Wichtigkeit. Mithilfe eines 360°-Laserscanners können viele Informationen der räumlichen Umgebung in das System eingespeist werden. Jedoch besitzt ein einzelner Scan (vgl. einzelnes Foto) nur eine vergleichsweise detailarme Abbildung der räumlichen Umgebung. Deshalb nutzen wir die Odometrie des Fahrzeugs, sowie GPS und GLONASS um eine Translation des Laserscanners im Raum festzustellen, die Punktwolke je Scan über die Zeit entsprechend zu transformieren und damit die Punktwolke zu verdichten.
Im nachfolgenden Video wurde die Punktwolke durch 200 einzelne Scans verdichtet.
Vom 6. bis 7.07.2017 haben Studenten der HTW und der TU Dresden, aus den Fachbereichen der Fahrzeugtechnik und Fahrzeugmechatronik, am Fahrdyndamischen Praktikum auf dem DEKRA Testoval in Klettwitz teilgenommen.
An unserer Station wurden Testfahrzeuge der FSD (VW Passat CC), IAV (VW Golf) und der HTW (BMW i3) mit Umfeldsensorik und Car2X Modulen ausgestattet. Im Video wird die Einscherer Erkennung des BMW i3 validiert. Alle Fahrzeuge sind mit Car2X Modulen ausgestattet, welche periodisch CAM Botschaften aussenden. Darin sind neben der aktuelle GPS Position, die Geschwindigkeit und Fahrzeugdimensionen enthalten. Der i3 ist mit zwei Webcams (Fokus auf Frontscheibe und Kombiinstrument ) sowie einem 360° Velodyne LiDAR System ausgestattet. Die simultane Aufzeichnung aller Daten erfolgt über das Robot Operating System (ROS). Im Nachhinein lassen sich die Daten abspielen und mit den ROS Werkzeugen RViz und MapViz visualisieren. Anhand dieser Messreihen können neue Algorithmen, z.B. zur Objekterkennung, entwickelt und getestet werden.
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.