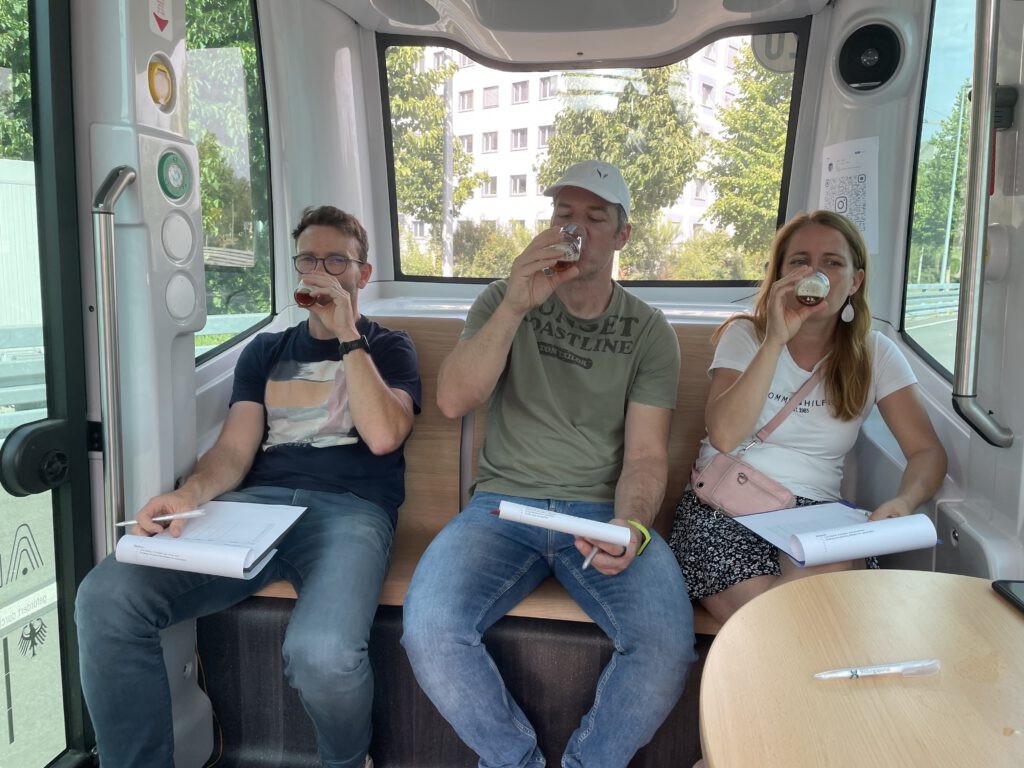
Die Firma Bertrandt hat sich der Weiterentwicklung des autonomen Shuttles vom Typ EasyMile verschrieben. Unter dem Namen BumbleB fahren die „aufgepeppten“ Fahrzeuge derzeit in Baden-Würtenberg und Sachsen. Für die LNDW 2026 wurde jetzt ein Fahrzeug für das Mechlab-Team bereitgestellt. Am 26.06.26 gibt es ab 17:00 Uhr gemeinsam mit den Bertrandt-Kollegen Live-Vorführungen auf dem HTWD-Testfeld.
Bertrandt has dedicated itself to the further development of the EasyMile autonomous shuttle. Known as „BumbleB,“ these upgraded vehicles are currently operating in Baden-Württemberg and Saxony. A vehicle has now been made available to the Mechlab team for the 2026 Long Night of the Sciences (LNDW). Live demonstrations will take place on the HTWD test track on June 26, 2026, starting at 5:00 p.m., in collaboration with the Bertrandt team.