Im Auftrag der FSD Fahrzeugsystemdaten GmbH aus Dresden (www.fsd-web.de) erstellte das mechlab-Team eine Simulation zum Test der neuen Diagnose-Kommunikation DoIP (Diagnostics over Internet Protocol). Kernelement ist dabei ein Steuergerät der Firma Softing, auf dem ein mittels Simulation erstelltes Modellfahrzeug nachgebildet wird. Ein erster Test zeigte die erfolgreiche Anbindung des HU-Adapters der FSD zur systematischen Weiterentwicklung der HU-Diagnosesoftware. In diesem Jahr wird im EasyMile-Shuttle eine entsprechende Diagnosemöglichkeit für die Umfeldsensorik integriert.
On behalf of FSD Fahrzeugsystemdaten GmbH from Dresden (www.fsd-web.de), the mechlab team created a simulation to test the new DoIP (Diagnostics over Internet Protocol) diagnostic communication system. The core element is a control unit from Softing, on which a model vehicle created using simulation is replicated. An initial test demonstrated the successful integration of the FSD HU adapter for the systematic further development of the HU diagnostic software. This year, a corresponding diagnostic capability for the environmental sensors will be integrated into the EasyMile Shuttle.
Vom 23-27.06.25 besuchte Prof. Branko Kavšek von der University of Primorska (Koper, Slovenien) die HTW Dresden. Neben fachlichen Gesprächen zur Vorbereitung des 2. FAMNIT/HTWD-Hackathons blieb noch genügend Zeit für die Erkundung der Stadt und der Umgebung. Durch hochqualifiziertes Fachpersonal konnte er zudem bei einer Fahrt mit dem autonomen Shuttle in die Vielfalt der sächsischen Brauereiprodukte eingewiesen werden.
From June 23-27, 2025, Prof. Branko Kavšek from the University of Primorska (Koper, Slovenia) visited the HTW Dresden. In addition to professional discussions in preparation for the 2nd FAMNIT/HTWD Hackathon, there was still plenty of time to explore the city and its surroundings. Highly qualified staff also introduced him to the variety of Saxon brewery products during a ride on the autonomous shuttle.
Am 19.12.2024 erfolgte die feierliche Übergabe eines Skoda Enyaq an die HTW Dresden. Prof. Oliver Manicke (Skoda und Honorarprofessor der HTWD) überreichte symbolisch den Schlüssel an die Rektorin der HTWD. Im Anschluss gab es einen ersten Vergleichstest zum Thema „Einparken“. Fünf Studierende des 3. Semesters Fahrzeugtechnik konnten zeigen, dass es auf dem Weg zur autonomen Mobilität noch viel zu tun gibt. Der durchgeführte Versuch ist Teil der Lehrveranstaltung „Mechatronische Grundlagen“. Die Versuchsbeschreibung und die Prüfungsaufgabe ist für Interessierte hier zu finden:
On December 19, 2024, a Skoda Enyaq was ceremoniously handed over to the HTW Dresden. Prof. Oliver Manicke (Skoda and honorary professor at the HTWD) symbolically handed over the key to the rector of the HTWD. This was followed by an initial comparison test on the topic of „parking“. Five students in the 3rd semester of automotive engineering were able to show that there is still a lot to do on the way to autonomous mobility. The experiment carried out is part of the course „Mechatronic Basics“. The experiment description and the exam task can be found here for those interested (in German):
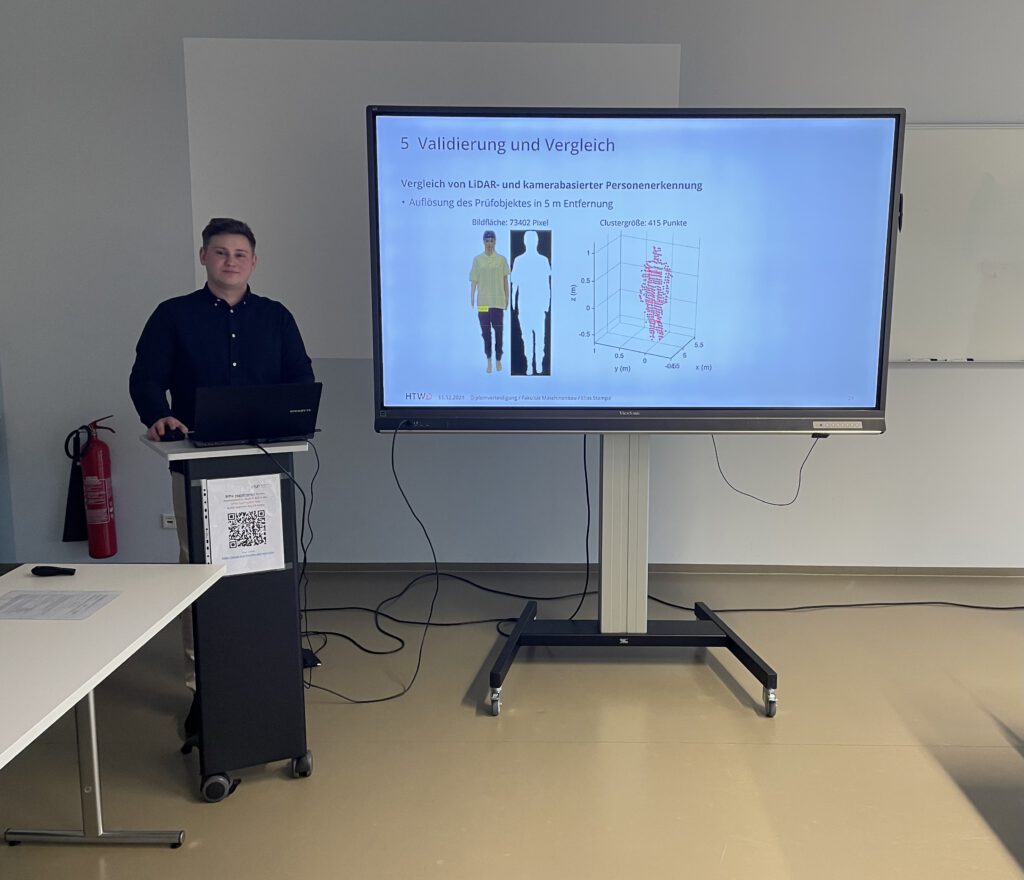
Im Jahr 2024 gab es einen neuen Rekord bei den internen Mechlab-Abschlussarbeiten (aktuell immer noch zum Dipl.-Ing. (FH)). Sieben Männer und eine Frau konnten erfolgreich ihre Arbeiten verteidigen und dürfen damit künftig diesen akademischen Grad tragen. Die Themen reichen dabei von der Bewertung von Lidar-Detektionen bis zur Auswertung von Unfalldaten. Alle Arbeiten sind frei verfügbar (in deutscher Sprache).
In 2024, there was a new record for internal Mechlab theses (currently still for Dipl.-Ing. (FH)). Seven men and one woman were able to successfully defend their theses and will thus be allowed to use this academic degree in the future. The topics range from the evaluation of lidar detections to the analysis of accident data. All theses are freely available (in German).
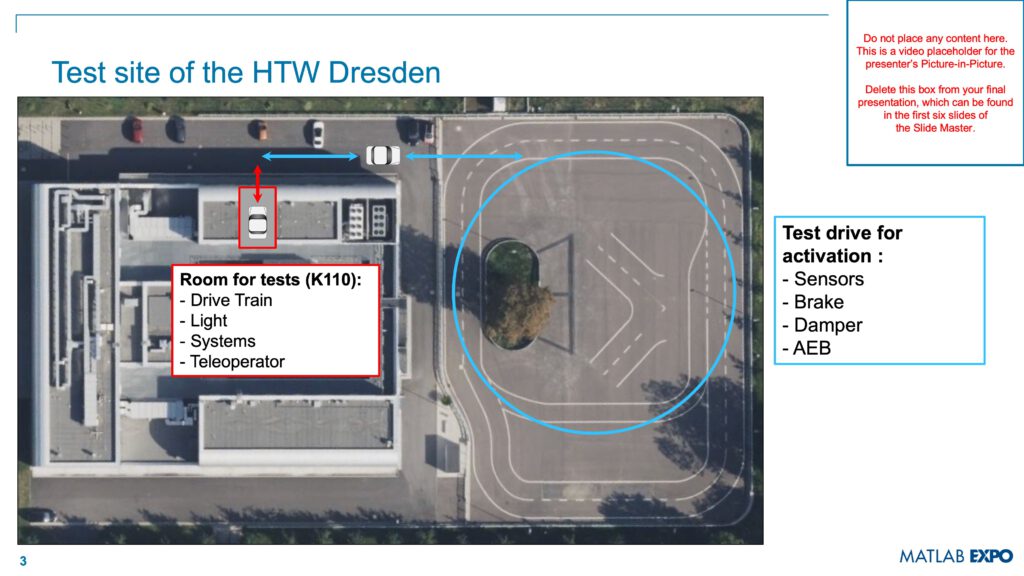
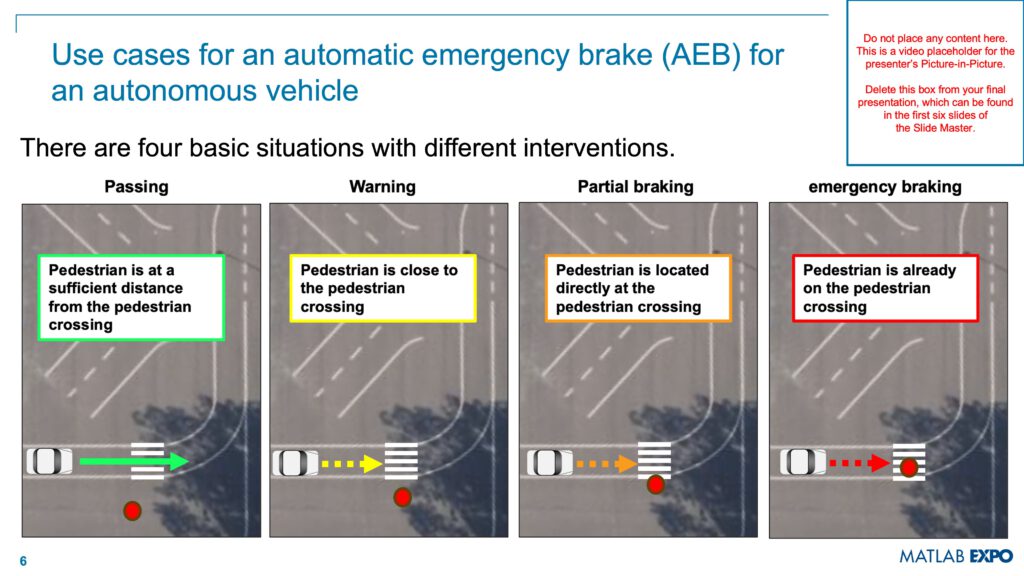
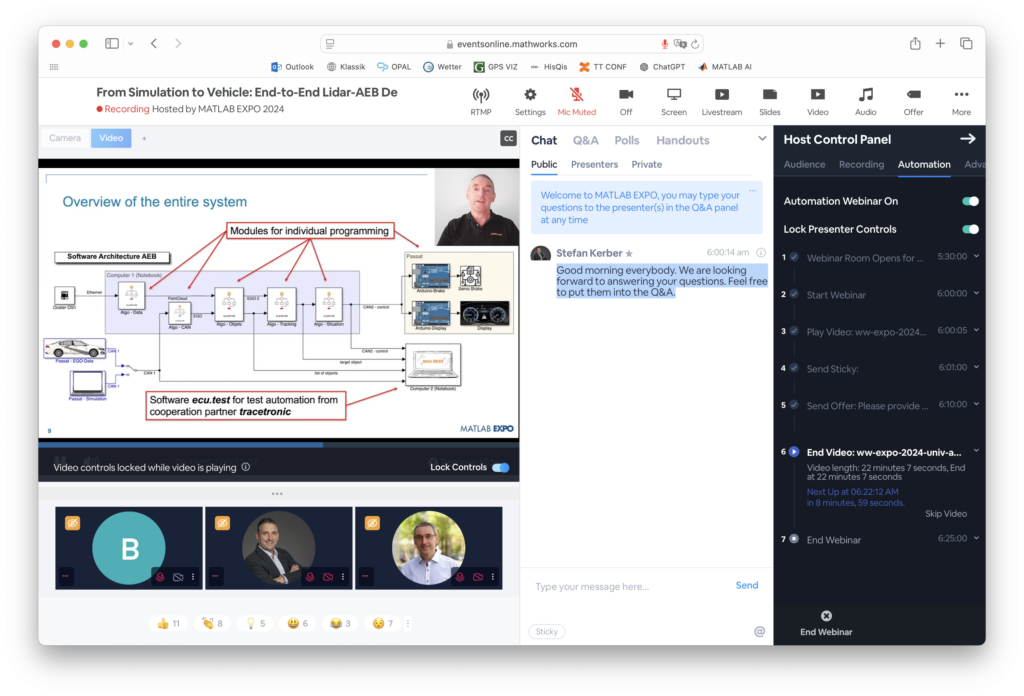
Heute gab es einen Vortrag des Mechlab-Teams auf der MatlabExpo 2024. Es wurde der aktuelle Entwicklungsstand für ein neues Testverfahren für autonome Fahrzeuge vorgestellt. Der konkrete Anwendungsfall ist dabei eine automatische Notbremse (AEB). Dabei stand natürlich der systematische Entwicklungsprozess mit Matlab/Simulink im Vordergrund. Ausgehend von einer 3D-Simulation erfolgte die Umsetzung bis hin zum Versuchsträger. Der gesamte Vortrag ist in einigen Tagen über Mathworks verfügbar. Das (wenig kommentierte) Simulink-Modell über diesen Download:
Today the Mechlab team gave a presentation at the MatlabExpo 2024. The current development status for a new test procedure for autonomous vehicles was presented. The specific application is an automatic emergency brake (AEB). The focus was of course on the systematic development process with Matlab/Simulink. The implementation started with a 3D simulation and ended with the test vehicle. The entire lecture will be available in a few days via Mathworks. The (little commented) Simulink model can be downloaded here:
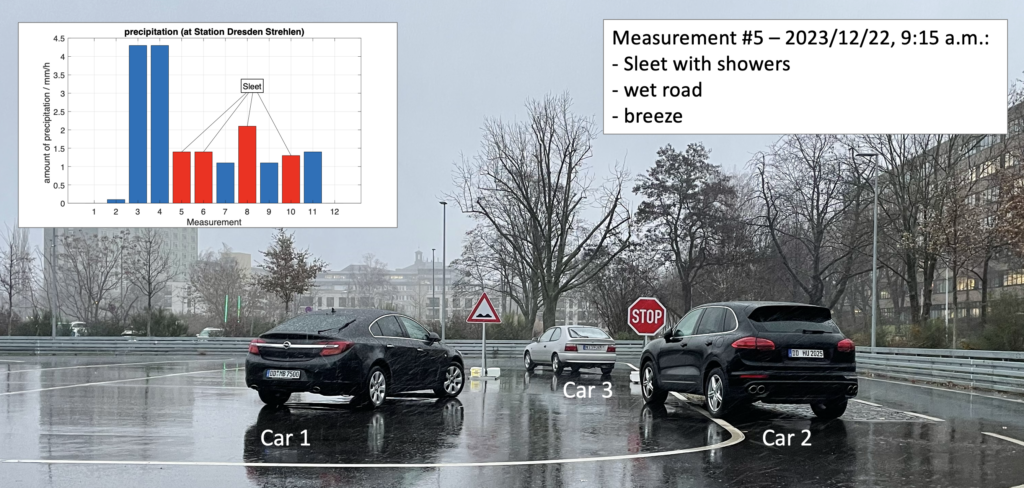
Lidar-Sensorik wird sehr stark durch die Witterung beeinflusst. In einer eigenen Untersuchung werden verschiedene Witterungseinflüsse untersucht. Dabei wurde auch die in Österreich für systematische Untersuchungen eingerichtete Teststrecke der Firma Digitrans genutzt. Die Messdaten sind auf Anfrage verfügbar (trautman@htw-dresden.de).
Lidar sensors are strongly influenced by the weather. A separate study investigated various weather influences. The test track set up by the company Digitrans in Austria for systematic investigations was also used. The measurement data are available on request (trautman@htw-dresden.de).
Beispiel für eine Auswertung // Example of an evaluation
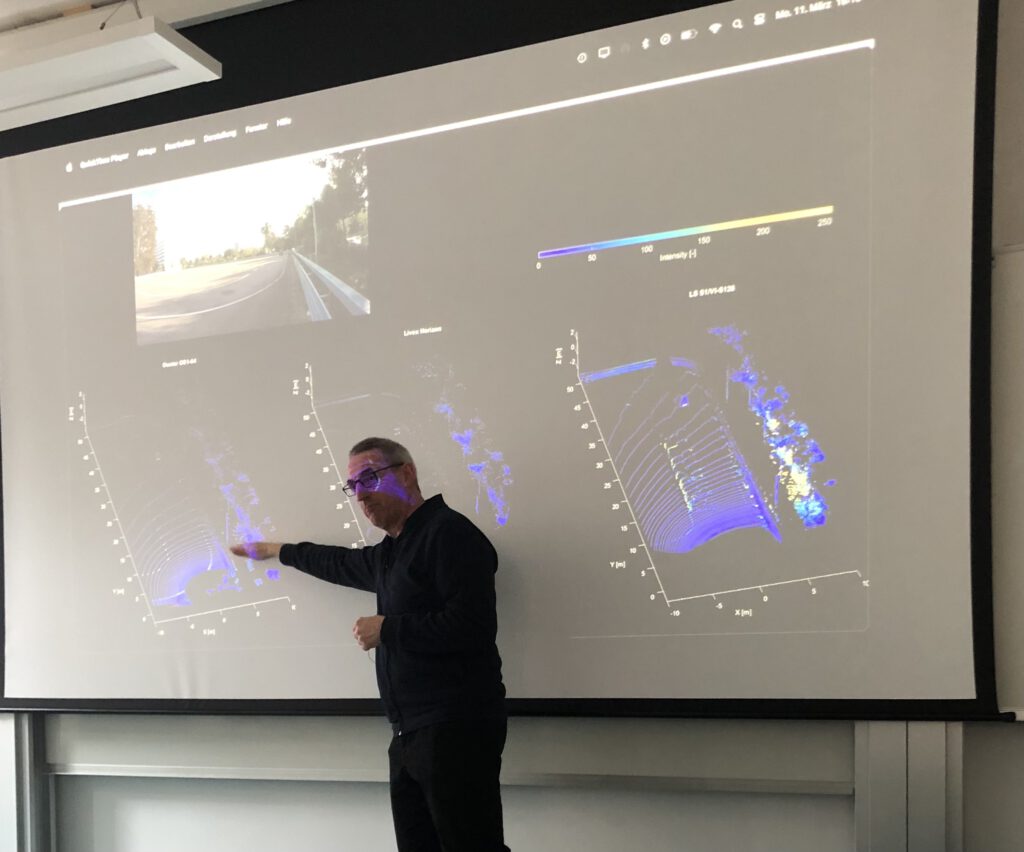
Zur Intensivierung der internationalen Zusammenarbeit besuchte Prof. Toralf Trautmann Anfang März die Universitäten Triest (Italien) und Koper (Slowenien). Neben Vorlesungen zu automatisierten Fahrfunktionen wurde im Fahrversuch eine auf Basis eines Lidar-sensors entwickelte Automatische Notbremsfunktion vorgestellt. Eine erste Folgeveranstaltung wird ein Hackathon im Herbst sein.
To intensify international cooperation, Prof. Toralf Trautmann visited the universities of Trieste (Italy) and Koper (Slovenia) at the beginning of March. In addition to lectures on automated driving functions, an automatic emergency braking function developed based on a lidar sensor was presented in driving tests. The first follow-up event will be a hackathon in the fall.
Impressionen aus Triest / Impressions from TriesteImpressionen aus Koper/Izola / Impressions from Koper/Izola
Die Arbeitsgruppe „Virtual System Development“ des Fraunhofer-Instituts IIS/EAS führte in KW 7 erste Versuche mit ihrer Messtechnik auf dem HTWD-Prüffeld erfolgreich durch. Es wurden verschiedene Szenarien aus dem urbanen Bereich mit dem Umfeld-Modul des Institutes aufgenommen. Eine erste Auswertung zeigt die Leistungsfähigkeit der Sensorik und der zugehörigen Erkennungssoftware. Ansprechpartner für weitere Informationen ist Gruppenleiter Dr. Christoph Sohrmann.
Der Kontakt zur Arbeitsgruppe entstand auf der VDI-Tagung Umfelderfassung im November 2023. Danach wurde eine Zusammenarbeit zwischen dem Institut, der HTW Dresden (Mechlab) und der Firma tracetronic vereinbart. Der Testlauf auf dem Prüffeld war hierbei nach gegenseitigen Besuchen die erste konkrete Umsetzung. Nachfolgend zu sehen sind einige Impressionen der Datenaufnahme sowie eine erste Auswertung (Rohdaten und Objekterkennung).
The „Virtual System Development“ working group of the Fraunhofer Institute IIS/EAS successfully carried out the first tests with their measurement technology on the HTWD test field in week 7. Various scenarios from the urban area were recorded using the institute’s environment module. An initial evaluation shows the performance of the sensors and the associated detection software. The contact person for further information is group leader Dr. Christoph Sohrmann.
Contact with the working group arose at the VDI “Environmental Perception” conference in November 2023. A collaboration was then agreed between the institute, HTW Dresden (Mechlab) and the company tracetronic. The test run on the test field was the first activity after mutual visits. Below you can see some impressions of the data recording as well as an initial evaluation (raw data and object recognition).
Video der Rohdaten // Video of raw dataVideo der Objekterkennung // Video of object detections
We visited ZalaZONE late November this year. It is located in Zalaegerszeg, Hungary, one hour east of the Austrian-Hungarian border. With about 260 ha of space the ZalaZONE test ground provides test oppertunities and facilities for the testing of a wide range of future mobility concepts. Though a lot of the test ground is still „work-in-progess“, within our cooperation with ZalaZONE we were granted access to establish some test sequences on the completed testsections.
Following measurements were recorded on November 28th with mostly poor weather conditions (cloudy, occasional light to heavy rain). The measurements took place in different designated areas of the testground. The following interpretation discusses general effects, problems and characteristics of the lidar pointcloud(s) and partly introduces and discusses the testfield area in use.
The hardware being used consits mainly of some of the following parts:
In general both lidarscanners output a cloud of points, where each point is given not only with standard x,y,z position attributes, but also with such as intensity information for each point. This value is a very good possibility for filtering and interpretation as values of important street environment facilities are equipped with a retroreflective surface, thus reflecting a higher amount of light back to the laserscanner than nature would usually allow in a common diffuse reflection. A heatmap-like colored pointcloud is used to visualize the intensity of returned points. The colder the colour, the higher the value of given point.
A rudimentary map is imported into the visualizer. This is directly taken from a section defined and exported from OpenStreetMaps: see ZalaZONE at OpenStreetMaps here.
Dynamic Platform Measurement
The following test is recorded at the dynamic platform as part of ZalaZONEs testground. For more information about the different sections see here.
The measurement at this section was setup as follows: Half way up the access stretch there is a RSU set-up, supposed for communication with the vehicle’s OBU, as well as there is a retroreflective section (1m) of lanemarker (provided by 3M) put out on the right side of the road, overlaying the usual lanemarkings (see figure below). Only the Velodyne VLP-16 is running in this test, therefore there isn’t such a high resolution given between laserscan layers.
Some of the recorded data:
gps positions of RSU and vehicle
pointcloud data
video data
communication RSU <–> OBU
Measurement starts at the far end of the access stretch to the dynamic platform passing the RSU and M3’s lanemarker strip halfway down the stretch and continuing on to the free space of the dynamic platform. Returning to the starting spot afterwards (see video below).
Goals are the evaluation of communication aspects (such as signal strength) between RSU & OBU and the investigation of pointcloud behaviour.
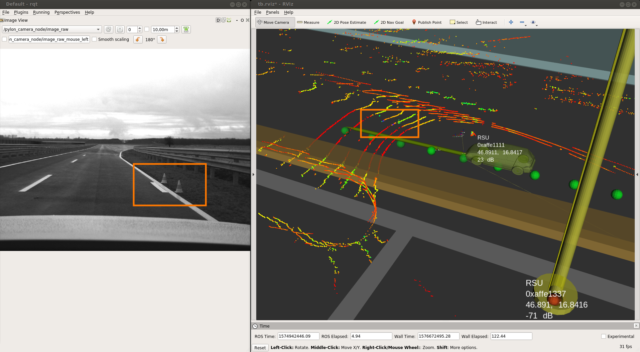
Fig. I: moment of approach
This snapshot shows the car at the moment of approach to the prepared lanemarker. The usual (standard) lanemarkings on the left and right of the lane are not retroreflective (colored red to orange, thus poor return value) in opposite to the prepared lanemarker: it’s value is very high and separates clearly from the ground around (indicated with green to blue color).
Fig. II: video and lidar visualization
This video shows the vehicle moving along the straight, passing the RSU and lanemarker onto the platform section. Important to mention here is the absence of lidar information of the street ahead and furthermore as soon as we are level with the platform section, there is no information (no points) to the right of the vehicle retrieved from the laserscanner. This is to be explained with the bad weather conditions on site. The wet surface of the street causes a total reflection of the light beams sent out.
Smartcity Measurement
This test is recorded at the Smart City Zone as part of ZalaZONEs testground. For more information about the different sections see here.
The hardware in use corresponds with the former setup, additionally the Ouster Lidar is in use as well.
Fig. III: top view of smart city ride
The RSU is set up on the bottom right, close to the starting point of the measurement, collected data corresponds to the data from the former measurement. Here again the pointcloud behaviour is targeted as well as the communication aspects.
The measurement procedure has the vehicle driving along the bottom of the map section, taking a right turn and doing a u-turn at the end of the street to take the way back. During this, a mixed driving profile with acceleration and deceleration at speeds ranging from 10-50 km/h is executed.
Fig. IV: smart city; view following
Street signs are well recognizable via intensity filtering (cold coloured points) of the pointcloud. The none-retroreflective (standard) lanemarkings are human-recognizable, but it’s hard to find a threshold as value differences compared to the street are not that significant. Still we retrieve more information from our surrounding environment as weather conditions are getting better and the street is not as wet as was with the former measurement.
An outgoing DENM is visualized as a pylon-texture during the ride around the section. In this case an aggressive deceleration leads to the output of this message. It is broadcasted to the surrounded vehicles.
Im Rahmen des Forschungsprojektes „NIVES“ wird die Nutzung und Fusion verschiedener Sensoriken am Fahrzeug zur teils vollständigen Automatisierung von Fahrfunktionen untersucht. Dabei ist eine detaillierte Erfassung der Umgebung von besonderer Wichtigkeit. Mithilfe eines 360°-Laserscanners können viele Informationen der räumlichen Umgebung in das System eingespeist werden. Jedoch besitzt ein einzelner Scan (vgl. einzelnes Foto) nur eine vergleichsweise detailarme Abbildung der räumlichen Umgebung. Deshalb nutzen wir die Odometrie des Fahrzeugs, sowie GPS und GLONASS um eine Translation des Laserscanners im Raum festzustellen, die Punktwolke je Scan über die Zeit entsprechend zu transformieren und damit die Punktwolke zu verdichten.
Im nachfolgenden Video wurde die Punktwolke durch 200 einzelne Scans verdichtet.
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.