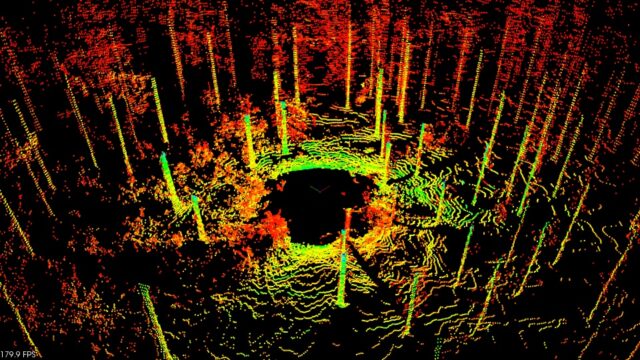
Mit dem Ziel zukünftige forsttechnische Maschinen zu automatisieren, soll der Baumbestand von Rückegassen über einen Lidar erkannt und als Referenz zur Positionierung verwendet werden. Im Rahmen einer Bachelorarbeit wurden drei Gassen im Tharandter Wald exemplarisch ausgewählt und mit einen Laserscanner (Ouster OS1) vermessen. Zur Bewertung der Messungen wurde der Baumbestand entlang der Gasse über ein Tachymeter vermessen.

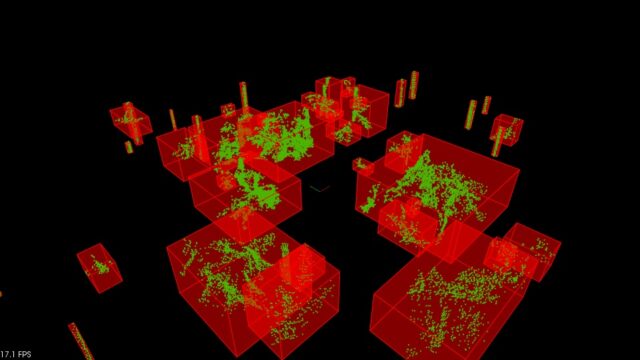
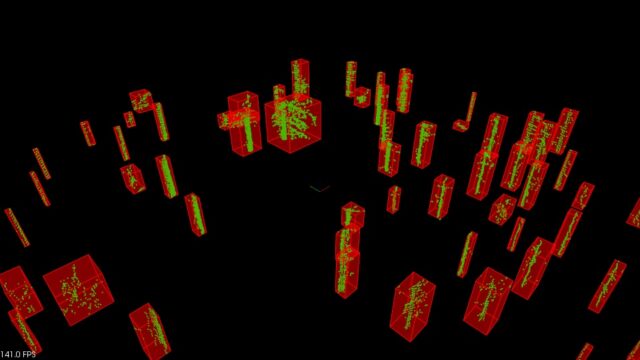
Die Punktdaten des Lidar wurden über eine Cropbox und anschließender Filterung (Voxel, Statistical-Outlier-Removal) reduziert. Über einen RANSAC wurde der Untergrund entfernt. Das anschließende Clustern erfolgte über einen euklidischen Ansatz. Als Ergebnis ist der Baumbestand als Bounding Box dargestellt.
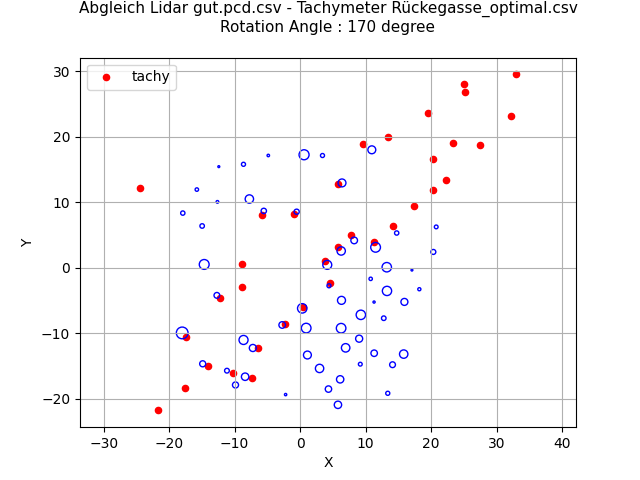
Final können die Objekte des Lidar mit den Daten des Tachymeter verglichen und bewertet werden.
Der Baumbestand in lichten Rückegassen wird sehr gut über das Verfahren erkannt. Eine Positionierung und Navigation von automatisierten Forstfahrzeugen wäre unter diesen Bedingungen und mit der Verwendung eines Lidar möglich. Weniger erfolgreich ist dieser Ansatz bei einem dichten Baumbestand. An dieser Stelle versagen die einfachen Methoden der Punktdatensegmentierung. Hier sind neue Ansätze und ergänzende Technologien gefragt.