Im Rahmen der wissenschaftlichen Fachvorträge des 7. Semester der Fahrzeugtechnik beschäftigte sich Martin Grosche mit dem Thema „Umfeldsensorik heute und in Zukunft: Was muss ein Auto sehen?“.
Zum besseren Verständnis wird in Folgendem mittels einleitenden Überschriften ein tiefere Einblick in die Thematik seiner Ausarbeitung gewährleistet.
Sensorik der Fahrerassistenzsysteme
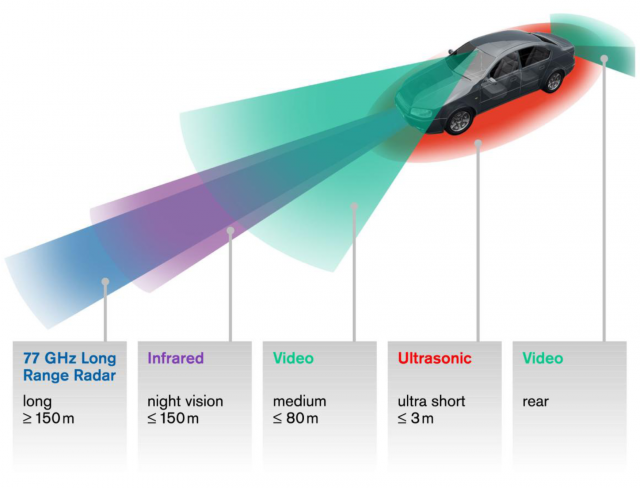
Zu der Serienproduktion von Fahrzeugen zählt immer öfter der Verbau von Fahrerassistenzsystemen (kurz: FAS). Hierbei bildet die Umfeldsensorik den Grundstein. Je nach Situation, Empfangsbereich und Öffnungswinkel kommen hier unterschiedliche Techniken der Umfeldwahrnehmung zum Einsatz.
Fahrerassistenzsysteme in Zukunft
Betrachtet man den Marktanteil der FAS gestützten Automobile, ist dieser im Bereich der Umfeldsensorik noch etwas zurückgeblieben. Dies mag daran liegen, dass sensorbasierende Assistenzsysteme noch recht teuer im Verbau und Anschaffung sind. Daher finden sie zu einem großen Prozentsatz ihren Einsatz in Oberklassefahrzeugen. Mit der Markteinführung von Lidarsystemen und der voranschreitenden Forschung, ist es allerdings nur eine Frage der Zeit, bis auch Mittelklasse Fahrzeuge serienmäßige FAS, wie zum Beispiel Spurhalteassistenten verbaut bekommen. Die völlige Entlastung des Fahrers von seiner Fahraufgabe und somit die Erfüllung des Konzeptes von Vision Zero, ist das Endziel aller Zulieferer von Umfeldsensoren, denn rein nüchtern betrachtet, liegt das größte Gefahrenpotential im Fahrer selbst. In diesem Zusammenhang erscheint häufig der Begriff „autonomes Fahren“. Bisher ist es durch die Gesetzgebungen nicht möglich ein solches Fahrzeugverhalten an den Tag zu legen. Doch mit der Entwicklung von Prüfvorgaben für aktuelle FAS ist bereits eine gute Grundlage geschaffen dem Ganzen etwas mehr Vertrauen zu schenken. Die folgende Tabelle soll zuletzt die Funktionsweise von FAS in der Prototypenphase darlegen.
Autonomes Fahren
Durch Verwendung der im Fahrzeugverbauten Umfeldsensorik und zu Grunde liegender Verkehrssituation, ist es durch Bekanntgabe des Fahrziels möglich autonom transportiert zu werden. Der Fahrer wird dabei komplett von seiner Aufgabe entlastet.
Bordsteinerkennung/Zebrastreifendetektion
Erkennt Bordsteinkanten ab einer Höhe von 8 cm und dient zur Erweiterung des Spurhalteassistenten bei schnee- oder laubbedeckter Fahrbahn. Zebrastreifenerkennung detektiert Kontraständerungen der Fahrbahn und unterstützt den Notbremsassistenten. Beide Systeme basieren auf einer Sensoreinheit.
Intelligente Geschwindigkeitsadaption
Beim Überschreiten der Geschwindigkeit, wird der Fahrzyklus durch erhöhtem Widerstand am Gaspedal oder wegnahmen des Motormoments beeinflusst. Dadurch soll sowohl das Unfallrisiko als auch der Verbrauch minimiert
Kreuzungsassistent
Beim Befahren einer Kreuzung wird das Umfeld detektiert, so dass zum Beispiel beim Annähern eines anderen Fahrzeugs die Fahrt so lange verweigert wird, bis dieses die Kreuzung passiert hat. Dem Fahrer ist dann die Weiterfahrt wieder gestattet.
Vorausschauassistent/ ECO Pro Route (BMW) /Inno Drive (Porsche)
Durch ein Ermittelten der Streckenbedingungen mittels Navigationssystem und Erkennen der Verkehrssituation Mittels Kamera, bewegt sich der Fahrer in einem energieeffizienten Bereich.
Stauassistent (Traffic Jam Assist/Ford)
Ermöglich dem Fahrer das Mitschwimmen in Stausituation durch selbstständiges Anpassen der Geschwindigkeit und Abstandsregelung mittels ACC.
Car-2-X
Im Folgenden soll etwas näher auf die Funktion von Car to Car Systemen eingegangen werden, da diese eine wichtiges Fundament des „autonomen Fahrens“ darstellt. Car to Car (Car2X) Systeme basieren auf die Kommunikation zwischen einzelnen Fahrzeugen. Mittels der fahrzeugseitig verbauten Umfeldsensorik und einem Wlan- Modul kann so der Abstimmungsprozess verfeinert werden. Die Technik bietet auf dem freien Feld eine Reichweite von 300 m und einen Erfassungsbereich von 360°. Im urbanen Gelände kann es durch Häuser allerdings zu einer Reichweitenminimierung kommen. Diese ist aber trotzdem noch besser als bei Kreuzungsassistenten, da das System nicht auf Sichtkontakt angewiesen ist. Mit der Serieneinführung von Car2X- Systemen ist es nicht nur möglich die exakte Geschwindigkeit und Gierate der umgebenden Fahrzeuge festzustellen, sondern der Eigenschaften, wie zum Beispiel Blinkerstatus oder Sitzbelegung. Durch eine Vernetzung aller Fahrzeuge ist eine Wirkung in allen Crashphasen eingeschlossen.
- Pre-Crash- Phase: Pannenwarnung, Stauendewarnung
- Crash –Phase: Kennen der kontrahentenseitigen Fahrzeugdaten
- Post- Crash- Phase: Warnung nachfolgender Fahrzeuge, Alarmierung und Navigation der Einsatzkräfte (sofern alle nötige Bauteile noch betriebsbereit)
Fazit
Damit die Automobilindustrie ihre Zukunftsvision vom „autonomen Fahren“ und somit von einer bis zur unfallfreien Verkehrsumgebung näher kommen kann, sind viele Innovationen notwendig. Im Vordergrund steht hierbei die Kostensenkung und Fusionierung von Umfeldsensoren. Demnach ist es wichtig auch in Mittelklassewagen hochwertige Sensoren auszubauen. Ein erster Schritt ist meiner Meinung nach die Verbreitung von PMD- basierenden 3D- Sensoren auf der Time of Flight- Basis. Durch eine gesamtheitliche Abbildung des Fahrzeugumfelds und eine verstärkte Vernetzung aller Sensoren, kann eine zeitsynchrone Verfügbarkeit aller nötigen Daten erreicht werden. Ebenfalls können durch die Erhöhung von Standards, wie die Sicherheit der Übertragung, Erweiterbarkeit und Modularität, die Stückzahlen erhöht und so die Kosten minimiert werden. Ein weiterer Schritt ist das Voranschreiten der Prüfvorgaben für solche Assistenzsysteme. Denn um die Funktionalität zu gewährleisten Bedarf es nicht nur im Vorfeld Erprobungen wie Simulation, Hardwaretests und Fahrversuche, sondern auch einsatznaher Prüfungen durch TÜV und Dekra. Zu guter Letzt ist eine Sache der Gesetzgebung das „autonomes Fahren“ zu ermöglichen, denn nur durch eine gesetzliche Verankerung ist es möglich durch FAS den Fahrer komplett von seiner eigentlichen Aufgabe zu entlasten. Des Weiteren wurde in der Ausarbeitung deutlich, dass es in ferner Zukunft nicht mehr ausreicht, dass unsere Fahrzeuge sehen. Demnach ist es notwendig ihnen auch hören und sprechen beizubringen. Meiner Meinung nach ist dies mit der Weiterentwicklung des Car2X- Konzeptes möglich.