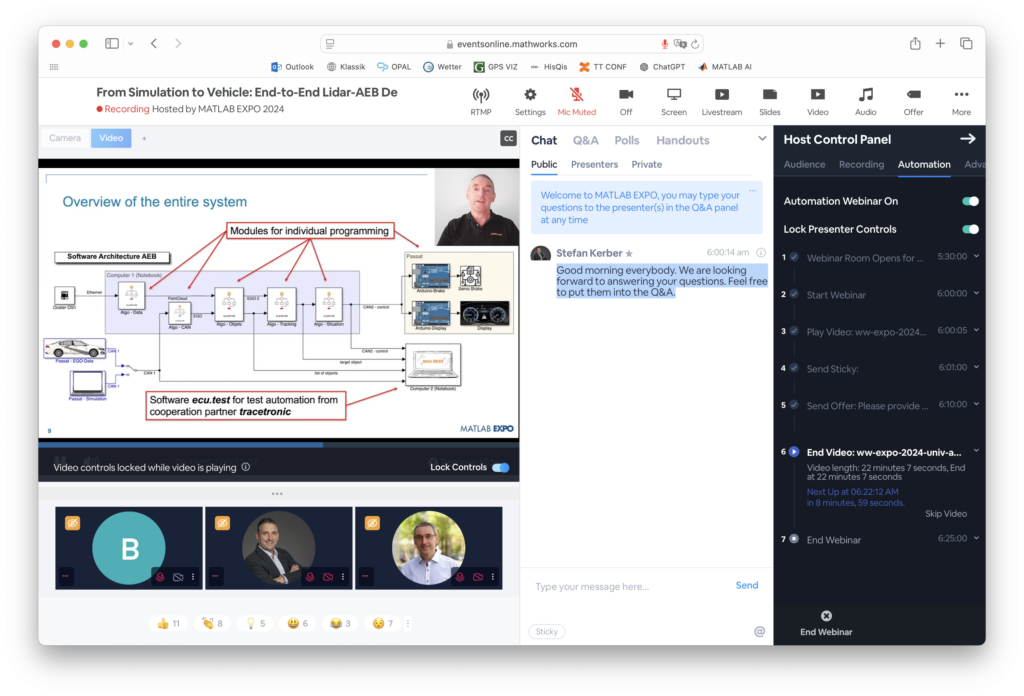
Heute gab es einen Vortrag des Mechlab-Teams auf der MatlabExpo 2024. Es wurde der aktuelle Entwicklungsstand für ein neues Testverfahren für autonome Fahrzeuge vorgestellt. Der konkrete Anwendungsfall ist dabei eine automatische Notbremse (AEB). Dabei stand natürlich der systematische Entwicklungsprozess mit Matlab/Simulink im Vordergrund. Ausgehend von einer 3D-Simulation erfolgte die Umsetzung bis hin zum Versuchsträger. Der gesamte Vortrag ist in einigen Tagen über Mathworks verfügbar. Das (wenig kommentierte) Simulink-Modell über diesen Download:
Today the Mechlab team gave a presentation at the MatlabExpo 2024. The current development status for a new test procedure for autonomous vehicles was presented. The specific application is an automatic emergency brake (AEB). The focus was of course on the systematic development process with Matlab/Simulink. The implementation started with a 3D simulation and ended with the test vehicle. The entire lecture will be available in a few days via Mathworks. The (little commented) Simulink model can be downloaded here:
Matlab-Expo: All Presentations (please select the Mechlab-Presentation)