Am Mittwoch, 25.07.2018, endete der Dresdner Teil der diesjährigen HAWtech Summer School „Automotive Engineering“. Den Schwerpunkt bildete in diesem Jahr die Analyse von Messdaten mittels Matlab. Mit den Ergebnissen erstellten die Studierenden in 4 Gruppen Präsentationen, in denen sie auf ausgewählte Aspekte der Analyse eingingen. Die Videos sind im YouTube-Kanal des Labors abrufbar (Click to Open).
Allgemeines
Erste Messungen mit Fernbereichs-Radarsensor
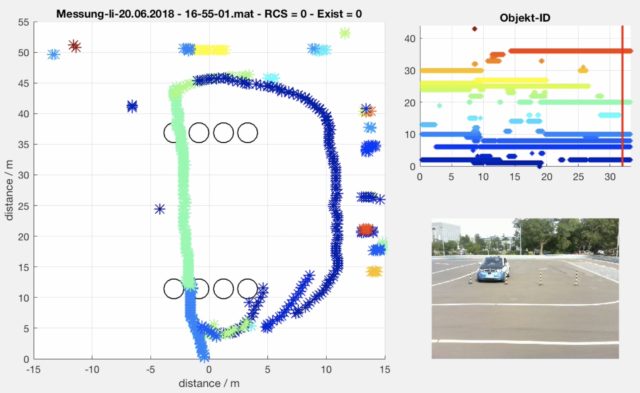
Zur Erweiterung der messtechnischen Kompetenz wurden im Rahmen des Projektes GewaF neue Radarsensoren der Fa. Continental angeschafft. Nach einigen Startschwierigkeiten bei der Einbindung der Sensoren in die Messumgebung Vector-Canape konnten nun erste systematische Test erfolgen. Das nachfolgende Video zeigt eine Messfahrt mit den einzelnen Objektdetektionen. Wie an der Farbe zu erkennen ist, erfolgt kein durchgehendes Tracking des Objektes mit einer ID. Dies muss in der nachfolgenden Datenfusion oder einem zusätzlichen Tracking erfolgen.
Zum Start des Videos bitte auf das Bild klicken.
Koreanische Delegation und VDI zu Besuch
 Am 22.05.18 besuchte eine Delegation der südkoreanischen Straßenverkehrsbehörde (Korea Transportation Safety Authority) das Mechlab-Team. Unter Führung von Behördenpräsident Byung Yoon Kwon gab es einen regen Erfahrungsaustausch zu aktuellen und künftigen Prüfmöglichkeiten für Fahrerassistenzsysteme und automatisierte Fahrzeuge. Dabei wurde sowohl auf bestehende Mechlab-Patentanmeldungen (EP000003052919B1, DE102016100156A1) zu praxisnahen Prüfverfahren eingegangen als auch die neuen Testmöglichkeiten im Rahmen der sächsischen Initiative zu intelligenten Verkehrssystemen.
Am 22.05.18 besuchte eine Delegation der südkoreanischen Straßenverkehrsbehörde (Korea Transportation Safety Authority) das Mechlab-Team. Unter Führung von Behördenpräsident Byung Yoon Kwon gab es einen regen Erfahrungsaustausch zu aktuellen und künftigen Prüfmöglichkeiten für Fahrerassistenzsysteme und automatisierte Fahrzeuge. Dabei wurde sowohl auf bestehende Mechlab-Patentanmeldungen (EP000003052919B1, DE102016100156A1) zu praxisnahen Prüfverfahren eingegangen als auch die neuen Testmöglichkeiten im Rahmen der sächsischen Initiative zu intelligenten Verkehrssystemen.
Weiterhin erfolgte an diesem Tag ein Besuch der Leiter der VDI-Landesgeschäftsstellen. Auch hier wurden Details zur Sensorik für automatisierte Fahrfunktionen vorgestellt. Das Mechlab-Team gibt seit diesem Jahr VDI-Schulungen zu genau diesem Thema. Im Bild zu sehen ist die Punktwolke des 360°-Laserscanners, der als Kerntechnologie für urbane Automatisierung gilt.

ROS RC-Car: Autonomes Fahrzeug im kleinen Format
Die Idee
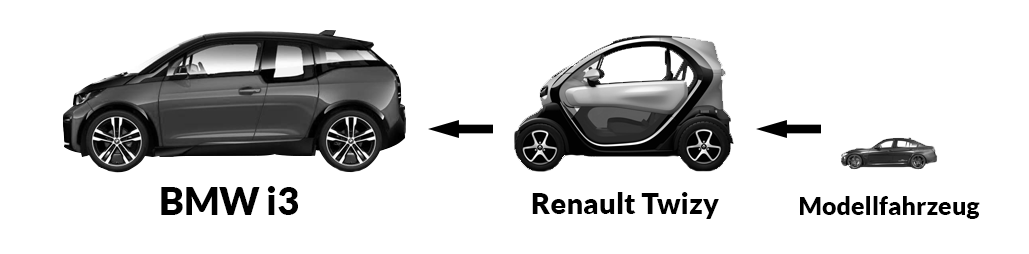
Eines der langfristigen Ziele der Forschungsgruppe NIVES ist die Evaluation und Fusionierung von Sensorik für autonome Fahrfunktionen. Dafür besitzt die Hochschule bis dato zwei Fahrzeuge, einen BMW i3 und einen Renault Twizy. Beide Fahrzeuge sind bereits zum Teil mit Sensoren und Aktuatoren ausgestattet worden um die grundlegenden autonomen Fahrfunktionen (Beschleunigen, Bremsen, Lenken) ohne menschliches Eingriff durchführen zu können. Durch die fortschreitende Entwicklung von Algorithmen für autonome Fahrfunktionen und dem noch nicht abgeschlossenen Umbau der verfügbaren Fahrzeuge entstand die Idee ein schnell einsatzbereites kleines Modellfahrzeug zu nutzen um sowohl die Algorithmen als auch das Gesamtsystem in einer natürlichen Umgebung, auf dem hauseigenen Testfeld der HTW Dresden, zu testen.
Die Vorteile eines Modellfahrzeugs sind:
- robust gebaut (eventuelle Fehler in den Algorithmen und resultierende Crashs sind bei einem RC-Auto harmlos)
- schnell einsatzbereit, tragbar
- kostengünstiger Umbau (meiste Sensorik durch andere Projekte bereits vorhanden)
- skalierbar (Algorithmen die auf das RC-Modell sinnvoll skaliert sind funktionieren auch im „echten“, großen Fahrzeug)
- benötigt wenig Platz (Testfahrten auf Testfeld nicht unbedingt nötig, Testfahrten im Gebäude leicht möglich)
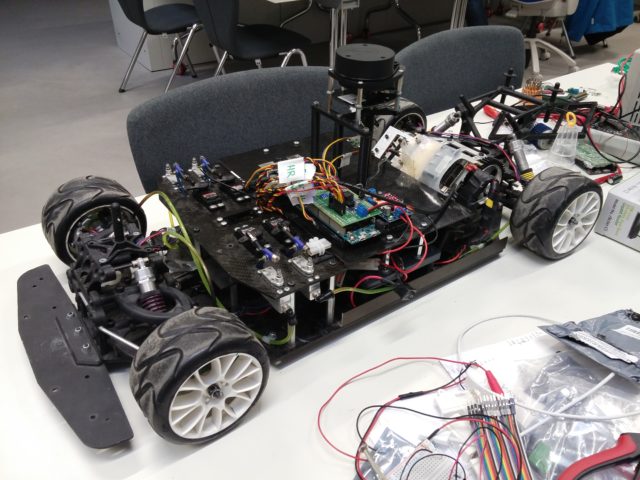
Die Basis
Als Basis dient ein 1:5 RC-Modell (Remote Control, Ferngesteuert), welches vor einigen Jahren für Studentenpraktika und Lehre angeschafft wurde. Es war bereits mit einem kräftigen Motor, einem Motortreiber, Servomotor an der Lenkachse, sowie vier weiteren Servomotoren zum Abbremsen jedes einzelnen Rades und Drehzahlsensoren ausgestattet. Schnell zeigte sich jedoch, dass der verbaute Motor für die geplanten autonomen Fahrsituationen, wie zum Beispiel Einparken und sanftes Anfahren, ungeeignet war. Vielmehr war das Modell auf Geschwindigkeiten von ca. 60km/h im Rahmen von dynamischen Fahrversuchen (ABS, ESP) ausgelegt, was zum Entschluss führte neben der vollständigen Überarbeitung der Elektronik und dem Einbau eines Computers auch den Antriebsstrang zu verändern.
Basis-Hardware:
- 1:5 Modellfahrzeug
- Heckgetrieben
- Servomotor an Lenkachse
- Hydraulische Bremsen für jedes Rad
- Drehzahlsensoren für jedes Rad
Auszumusternde Basis-Hardware:
- Brushless-Motor mit Brushless-Motortreiber
- NiMH Akkus 12v, 4000mAh
- PCB zur Ansteuerung des Systems mit MatLab
Die ungeeignete Hardware sollte im folgenden Umbau im Rahmen der „Modernisierung“ zum autonomen Fahrzeug weichen.

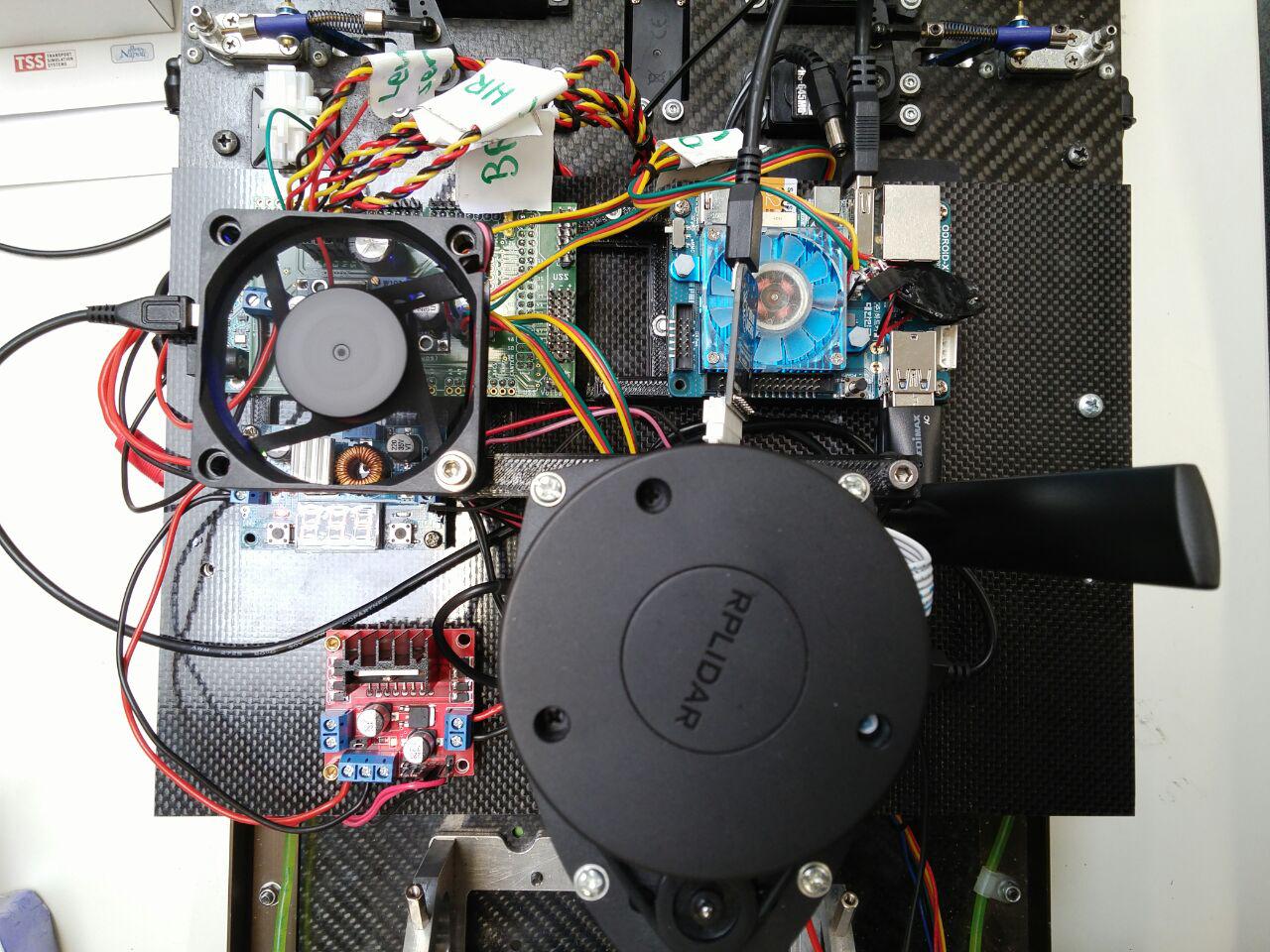
Elektronik
Als leistungsstarker Kleinstcomputer wurde ein Odroid XU4 verbaut. Er zeichnet sich gegenüber einem Raspberry Pi 3 durch doppelt so viel RAM und einer wesentlich stärkeren CPU aus. Der Computer dient zur Berechnung der teils komplexen Fahrmanöver und erlaubt die Kommunikation mit anderen Computern in einem verfügbaren WLAN-Netzwerk.
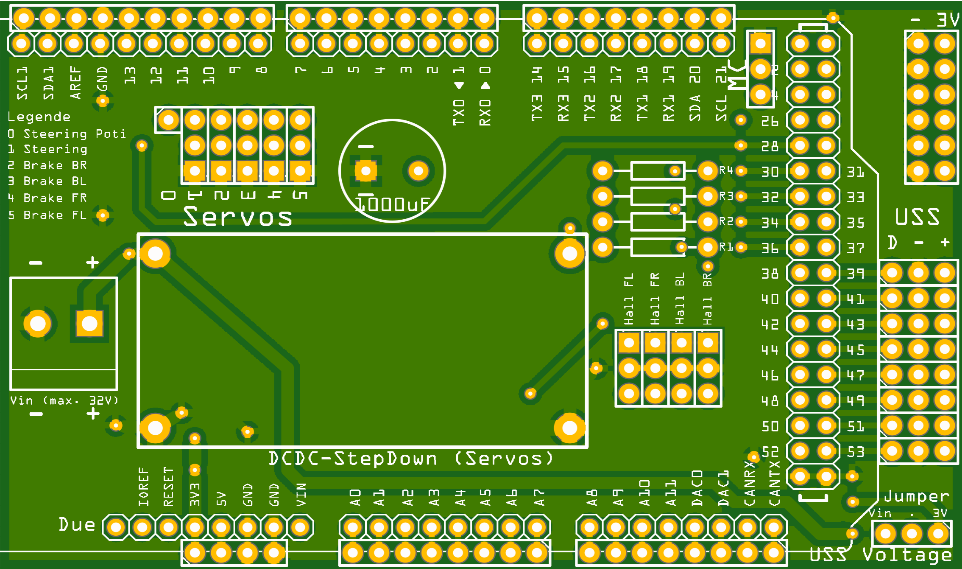
Die Ansteuerung der Motoren und Auslesen der Sensoren erfolgt mithilfe eines Arduino Due, welcher per USB-Seriell-Schnittstelle mit dem Odroid kommuniziert. Für ein einheitliches und „aufgeräumtes“ Kabelmanagement wurde für den Arduino Due eine Aufsteckplatine entworfen, welche alle Motoren und Sensorsysteme auf einer Platine zentral zusammenführt. Darüber hinaus ist die Aufsteckplatine mit bis zu acht Ultraschallsensoren erweiterbar.
Umbau
Im folgenden wird der Umbau in mehreren Stufen beschrieben.
Umbauten Stufe 1
- Schaffung einer neuen Ebene zur Montage der Elektronik (Carbonplatte) mit Montagesäulen aus dem 3D-Drucker
- Nutzung der großen Kammer unter der Carbonplatte zur Anbringung der neuen Akkus und Kabelmanagement
- Montage eines RPLidar 360° Laserscanners mithilfe 3D-gedruckter Bauteile
- Planung und Bestellung eines PCB als Aufsteckplatine für den Arduino Due
- Montageplatte für die Elektronik erstellt und 3D-gedruckt
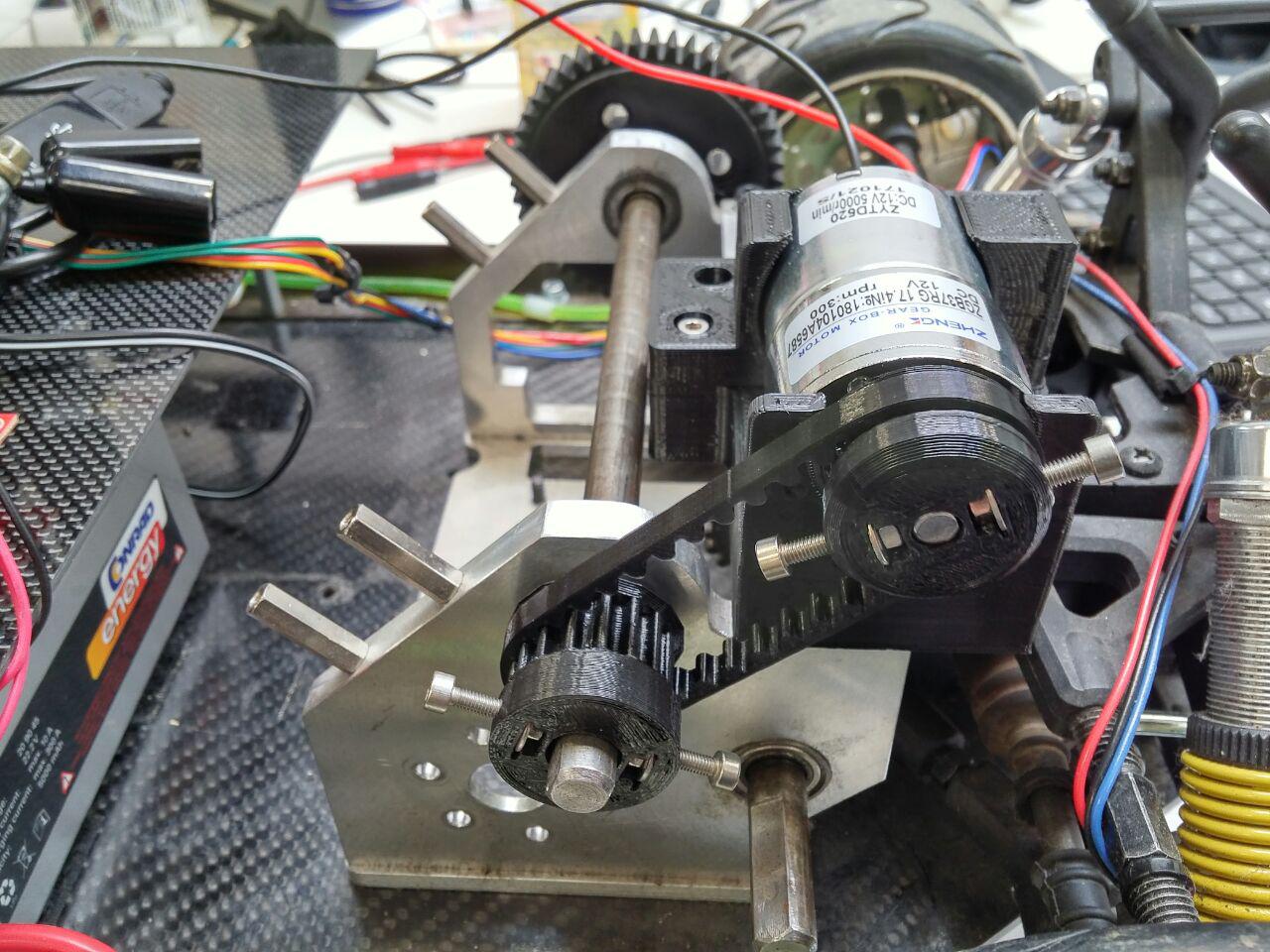
Umbauten Stufe 2
- Ersetzen des vorhandenen Brushless-Motor mit geeignetem DC-Getriebemotor (erlaubt langsame Bewegung)
- 3D-Druck von Zahnriemenrädern (PETG) und Zahnriemen (TPU) mit dem Zahnprofil HTD, sowie einer Motorhalterung
- Unterbringung des DC-Schrittmotortreibers
- Lüfter zur Kühlung der Spannungswandler
- Einbau eines leistungsstarken LiPo-Akkus (6s mit 5000mAh), entfernen der wesentlich schwereren NiMH Akkus
- Anpassung der Modellfahrzeugkarosserie auf die verbaute Hardware (Ausschnitte für Laserscanner)


Der Artikel wird zukünftig fortlaufend aktualisiert. Es folgt in Kürze der Bericht zur Umbaustufe 3.
Besuch Berufsschulklasse aus Nordhausen
Im Rahmen der Nachwuchsförderung haben uns heute 25 Auszubildende der Kfz-Mechatronik im zweiten Lehrjahr von der Berufsschule Nordhausen besucht.
Kernthemen waren die Vorstellung unserer Versuchsfahrzeuge BMW i3 und Renault Twizy mit der verbauten Messtechnik und Umfeldsensorik, sowie eine kurze Einführung in die Welt der Robotik.

Nach einem Fahrversuch zum Thema Car2X-Kommunikation auf unserem Test- und Prüffeld, demonstrierte Patrick Richter den interessierten Azubis eine Eigenentwicklung zum automatisierten Test von Fahrzeugumfeldsensorik.

Im Fokus der Veranstaltung stand die Vermittlung von Grundlagenwissen zu Fahrzeugkommunikationsstrukturen und -Umfeldsenorik. Die Versuchsfahrzeuge bildeten in diesem Zusammenhang eine direkte Schnittstelle zur praktischen Anwendung der jeweiligen Systeme.
Mechlab-Team gibt erstmals VDI-Schulung
Am 13.03.2018 findet die erste VDI-Schulung des Mechlab-Teams unter Leitung von Prof. Dr. rer. hat. Toralf Trautmann statt. Unter dem Titel „Umfeldsensorik im Fahrzeug“ erhalten die Teilnehmer einen Einblick in aktuelle und künftige Sensoren für die Erkennung des Fahrzeugumfeldes. Am zweiten Tag wird durch Dozenten des FKA Aachen das Thema „Sensordatenfusion“ behandelt.

Inbetriebnahme des SICK LD-MRS Laserscanners am Renault Twizy
Der SICK LD-MRS400102 HD Laserscanner ermöglicht eine Detektion von Hindernissen über einen Arbeitsbereich von 110° und 4 Ebenen. Der Sensor soll denn bisher im Renault Twizy verwendeten Hella Idis Laserscanner ersetzen und u. a. in den Projekten Platooning und GEwAF sowie weiteren interdisziplinären Forschungsprojekten zum Einsatz kommen. Im Video ist die Darstellung der Rohdaten des Laserscanners mithilfe des ROS Rviz Frameworks zu erkennen. Als Maßgabe für die Adaption des Sensors an das Fahrzeug erfolgte die Kalibrierung mithilfe mehrerer Pylonen und der hinteren Fahrzeugkontur eines weiteren Twizys.

MDR-Kurzbeitrag
Der Verkehrsgerichtstag 2018 in Goslar beschäftigt sich unter anderem auch mit den Entwicklungen im Bereich des automatisierten Fahrens. Der MDR hatte hierzu einige Fragen an das Mechlab-Team und hat den aktuellen Arbeitstand in einem kurzen Beitrag festgehalten. Dieser lief am 20.01.18 in der Hauptausgabe von MDR aktuell um 19:30 Uhr. Der Sendebeitrag in der MDR-Mediathek ist (solange verfügbar) durch einen Klick auf das Bild verfügbar.
ASAM International Conference 2017
Unter dem Motto „Autonomous Driving – Big Testing and Big Data as the Next Challenge“ tagte vom 06-07.12 die ASAM International Conference 2017 im Dresdner Congress Center. Auch das Team mechlab war mit einem eigenen Stand vertreten und zeigte anschaulich, wie die Planung und Simulation von automatisierten Fahrmanövern mithilfe der Entwicklungsumgebung Unity3D in der Realität umgesetzt werden könnte. Beispielhaft wurde die gewünschte Trajektorie zunächst mit der Applikation für die Testfläche der HTW Dresden geplant und im Folgenden auf das Fahrzeug übertragen. Der reale Fahrversuch stellt anschließend die letzte Stufe im systematischen Entwicklungsprozess dar und ist Voraussetzung für die Validierung der Fahrmanöver im urbanen Verkehr.

ROS Rviz – 360° LiDAR – Punktwolken Verdichtung
Im Rahmen des Forschungsprojektes „NIVES“ wird die Nutzung und Fusion verschiedener Sensoriken am Fahrzeug zur teils vollständigen Automatisierung von Fahrfunktionen untersucht. Dabei ist eine detaillierte Erfassung der Umgebung von besonderer Wichtigkeit. Mithilfe eines 360°-Laserscanners können viele Informationen der räumlichen Umgebung in das System eingespeist werden. Jedoch besitzt ein einzelner Scan (vgl. einzelnes Foto) nur eine vergleichsweise detailarme Abbildung der räumlichen Umgebung. Deshalb nutzen wir die Odometrie des Fahrzeugs, sowie GPS und GLONASS um eine Translation des Laserscanners im Raum festzustellen, die Punktwolke je Scan über die Zeit entsprechend zu transformieren und damit die Punktwolke zu verdichten.
Im nachfolgenden Video wurde die Punktwolke durch 200 einzelne Scans verdichtet.