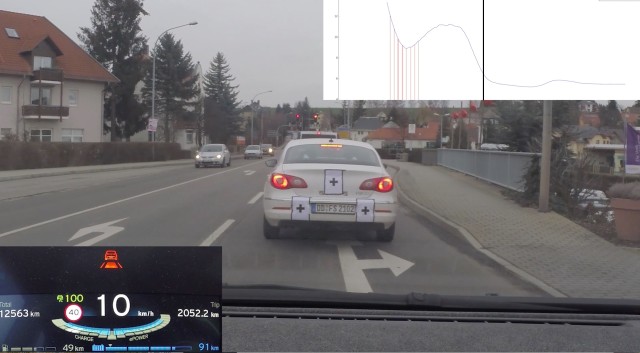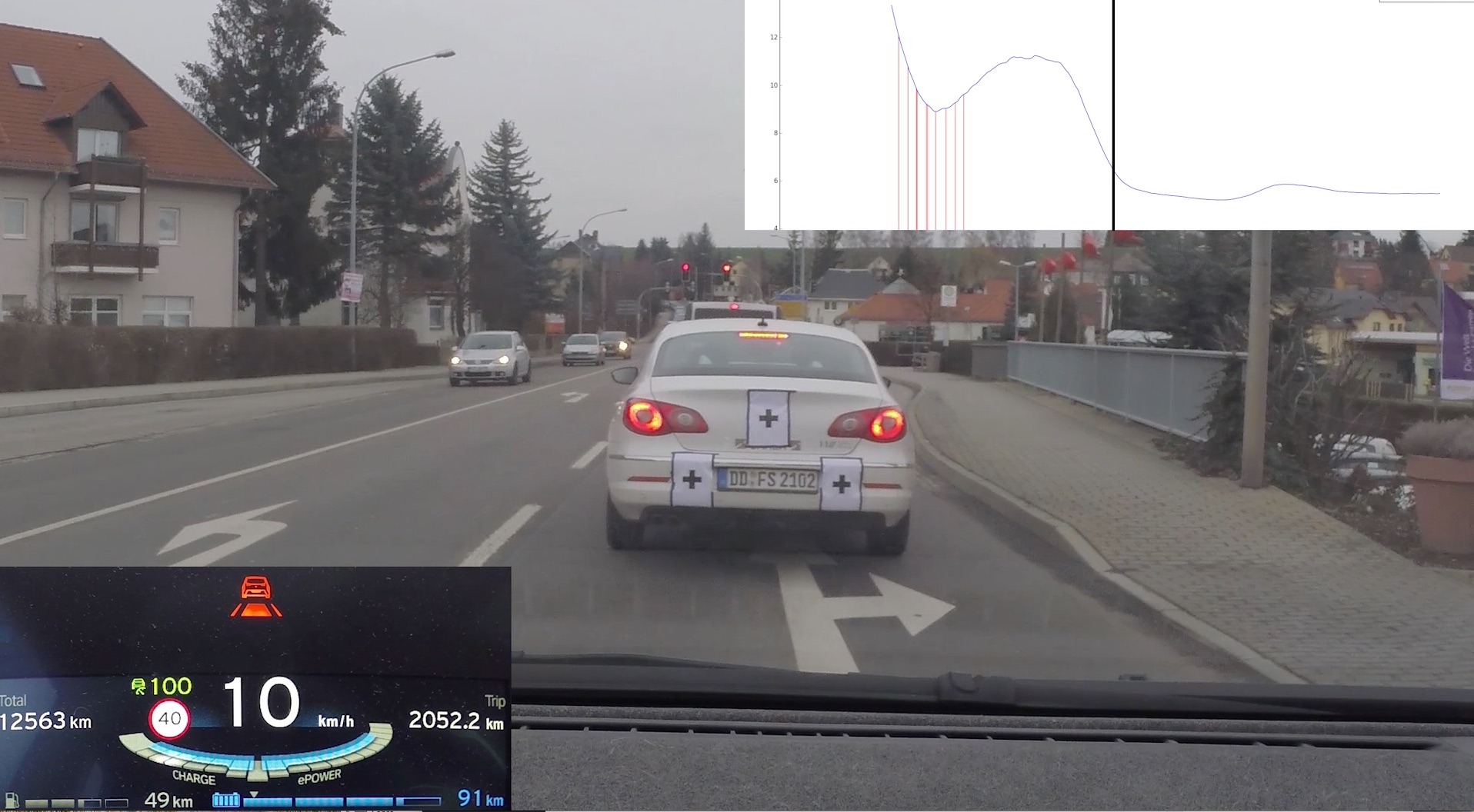
Der kamerabasierte Notbremsassistent des BMW i3 konnte sowohl bei einer Messfahrt als auch auf dem Prüfstand im Labor für Kfz-Mechatronik erfolgreich getestet werden. Dank der von Patrick Richter im Rahmen seiner Masterarbeit entwickelten Prüftechnik ist die Abstandsbestimmung zu einem vorausfahrenden Fahrzeug mittels Markierungen möglich. Damit ist die Zuordnung der Warnschwellen zu den verschiedenen Warnstufen möglich und bewertbar.