Der am 23.07.20 mit großem Testaufwand erstellte Beitrag für MDR-Wissen ist nun online. Mit einem Klick auf das Bild gelangt man zur entsprechende Seite.
Laboratory of Automotive Mechatronics
Der am 23.07.20 mit großem Testaufwand erstellte Beitrag für MDR-Wissen ist nun online. Mit einem Klick auf das Bild gelangt man zur entsprechende Seite.
Im Herbst 2018 erstellte ein Team von MDR-Wissen einen Beitrag zur Zukunft der Mobilität. Dort wurden die gerade begonnenen Aktivitäten des Mechlab-Teams auf dem Prüffeld der HTW vorgestellt. Jetzt war es an der Zeit, eine Aktualisierung zu erstellen. Hierzu wurden am 23.07.20 neue Aufnahmen erstellt. Den Schwerpunkt bildete dabei die Prüfung automatisierter Fahrfunktionen mit der vom Mechlab-Team erstellten Prüftechnik. Diese ist bereits bei Fahrzeugherstellern im Einsatz. Wie in den nachfolgenden Ausschnitten zu erkennen ist, sind die gegenwärtig verfügbaren Seriensysteme nicht immer in der Lage, einen Unfall mit einem Fußgänger zu verhindern. Daher bleibt es dabei, der Fahrer muss weiterhin aufmerksam sein und darf sich nicht vom Verkehrsgeschehen abwenden. Die Systeme sind lediglich ein letzter Schutz bei einer kurzzeitigen Ablenkung oder einer Überforderung des Fahrers.

Das Mechlab Team war mit Dirk und dem BMW Tech i3 auf dem Campustag vertreten. Es kamen viele Studenteninteressenten um sich über die einzelnen Fakultäten und deren Studiengänge zu informieren. Wir haben dabei die Fahrzeugtechnik vertreten. Wir denken es war eine gelungene Veranstaltung, um die HTW Dresden nach außen zu präsentieren.
In Kooperation mit DRESDEN-concept und dem Rapid-Labor der HTW Dresden nutzen wir unsere freien 3D-Druck Kapazitäten um Teile für Gesichtsschilde herzustellen und damit bei möglichen Lieferengpässen von medizinischen Bedarfsteilen auszuhelfen. Dadurch können wir täglich bis zu 20 Bauteile zur Verfügung stellen und unseren Teil bei der Bekämpfung des SARS-CoV-2 Virus leisten.
Weitere Infos:
https://www.htw-dresden.de/news/dresden-concept-produziert-3d-gedruckte-gesichtsschilde-fuer-dresdner-kliniken-mit-dabei-das-rapid-labor-der-htw-dresden
https://www.dresden-concept.de/services/coronavirus-3d-druck.html
Am 01.04.2005 betrat ich als frisch berufener Professor die HTW Dresden. Seit dieser Zeit ist viel passiert, zahlreiche Studenten und Mitarbeiter haben im Labor mitgewirkt oder sind immer noch aktiv dabei. Vielen Dank hierfür und auf weitere gute Zusammenarbeit.
Mein Dank gilt auch allen Projektpartnern, die durch ihre Mitwirkung und die finanzielle Unterstützung die Erfolge des Labors erst möglich gemacht haben. Auch hier hoffe ich auf weitere spannende Projekte für die nächsten 15 Jahre.
Leider verhindert die Corona-Pandemie derzeit eine Feier, diese ist aber nur aufgeschoben. Tröstlich ist, dass wenigstens ein Mitarbeiter kommen durfte, auch wenn das Gespräch etwas einsilbig verläuft.

Am 02.03.2020 besuchte Landespolizeipräsident Horst Kretzschmar die HTW Dresden. Zum Abschluss seines Besuchs informierte er sich beim Mechlab-Team auf dem Prüffeld für automatisierte Fahrfunktionen über technische Randbedingungen des automatisierten Fahrens. Dabei zeigte er sich nach der üblichen Testfahrt beeindruckt von der Leistungsfähigkeit des Teams und den Möglichkeiten, die den Studierenden in diesem Bereich geboten werden.

Das vom Mechlab-Team entwickelte Robotersystem wurde offiziell in einer BMW-Presseinformation zu neuen Prüftechnologien vorgestellt. Mit diesem System ist eine effektive und genaue Prüfung der neuen Funktion „Komfort-Zugang“ möglich. Das nachfolgende Video (Link zur Originalseite) zeigt das System im Einsatz.
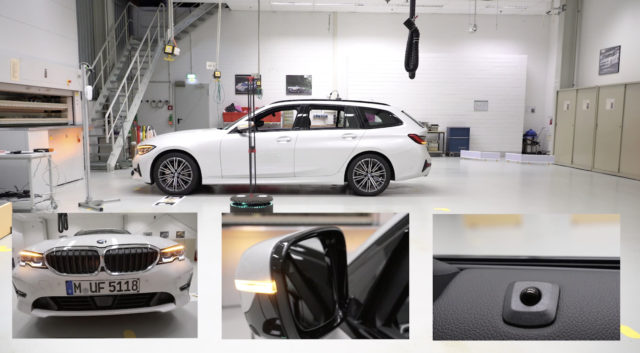
Der zugehörige Artikel ist hier verfügbar:
Zur systematischen Analyse der 3M-Spurmarkierungen auf dem HTW-Prüffeld erfolgten Messungen mit Laserscannern und Referenzmesstechnik. Dabei ist besonders die Messungen im nassen Zustand wichtig für die Bewertung der Sichtbarkeit. Um hierbei einheitliche Verhältnisse zu erzielen, gibt es den sogenannten Euroschwung. In der Richtlinie heißt es dazu:
„Ein mit klarem Wasser gefüllter l0-l-Eimer wird in einerHöhe von ca. 0,5m so über der Probemarkierung entleert, daß das gesamte Meßfeld und die angrenzende Oberfläche annähernd zeitgleich vom Wasser überflutet werden (Euro-Schwung).“ (FGSV 375 TL M 06)
Klingt einfach, ist es natürlich nicht. Erst mit jahrelanger Übung gelangt man hier zur Meisterschaft. Wie es beim Profi aussieht, zeigte uns Herr Ingo Benesch von der Firma 3M bei seinem letzten Besuch.
Das Mechlab-Team wird jetzt täglich üben, damit Herr Benesch die Versuchsdurchführung künftig in unsere Hände übergeben kann.
Am 20. und 21.02.2020 besuchte Prof. Toralf Trautmann das europäische Forschungs- und Entwicklungszentrum von 3M in Neuss. Ziel des Besuches war die Ausweitung der Zusammenarbeit auf dem Gebiet der sicheren Erkennung von Fahrspurmarkierungen und Verkehrsschildern. Die Produktpalette der Firma 3M bietet hier in Kombination mit Lidarsensorik ein erhebliches Potential für automatisierte Fahrfunktionen. Nach einem intensiven Erfahrungsaustausch wurden im 3M Reflective Science Center (Labor) Messungen mit 2 Lidarsystemen (Velodyne Puck und Ouster OS-1) durchgeführt. Dabei konnte nachgewiesen werden, dass durch die intensive Rückstreuung eine sichere Erkennung der Schilder möglich ist. Somit können Fehler, die bei alleiniger Detektion mittels Kamerasensorik auftreten, vermieden werden. Besonderes großes Potential bietet die Erkennung retroreflektierender Fahrspurmarkierungen. Auf Basis der Ergebnisse einer Studie auf dem HTW-Prüffeld sollen weitere systematische Untersuchungen folgen.


Weitere Informationen:
HTW Dresden
Prof. Dr. rer. nat. Toralf TrautmannKfz-Mechatronik
Friedrich-List-Platz 1
01069 Dresden
Tel.: 0351 – 462 2854
trautmann@mw.htw-dresden.de
3M Deutschland GmbH
Marcel Döring
Carl-Schurz-Str. 1
41453 Neuss
Telefon: 02131/14-3183
mdoering@mmm.com
Am 25.02.2020 startet um 17:30 Uhr an der Haltestelle der Linie 10 (Richtung Messe Dresden) am Straßburger Platz die Sonderfahrt in der DDc Science Tram. Das diesjährige Thema lautet: Mobilität im Wandel. Prof. Toralf Trautmann wird hier die aktuelle Forschung des Mechlab-Teams zu automatisierten Fahrfunktionen vorstellen. Weitere Informationen und die Anmeldung finden sie hier:
https://www.eventbrite.de/e/mobilitat-im-wandel-sonderfahrt-in-der-ddc-tram-tickets-92872346689