Die stetige Weiterentwicklung des HTW-Prüffeldes führt nun auch in die 3. Dimension. Ab sofort steht eine Drohne zur Verfügung, mit deren Hilfe die Versuche zur Fahrzeugvernetzung wesentlich besser dokumentiert werden können. Das nachfolgende Video (zum Start bitte auf das Bild klicken) zeigt die Drohnenaufnahme aus zwei Perspektiven und die synchron dazu aufgezeichneten GPS-Positionen der Fahrzeuge und der Basisstation. Diese diente auch zur Ansteuerung einer Ampel, deren aktuelle Phasen auf die „gedachte“ Fahrspur projiziert wurden. Die Daten wurden über ein V2X-Netzwerk nach dem Standard 802.11p (WLANp) ausgetauscht.
Dreharbeiten für MDR-Beitrag
Am 10.09.18 fanden am Nachmittag umfangreiche Dreharbeiten für einen Wissenschaftsbeitrag des MDR-Fernsehens statt. Zum Thema „Mobilität der Zukunft“ informierte sich das Aufnahmeteam über die aktuellen Arbeiten im Labor für Kfz-Mechatronik. Erstmals konnte auch eine automatisierte Fahrt mit Spurführung mit dem Renault-Twizy gezeigt werden (VIDEO).
Der Sendezeitpunkt steht noch nicht exakt fest, voraussichtlich wird der Beitrag am 10.10.18 im Spätprogramm gesendet.

Sachsens Finanzminister zu Besuch
Am 28.08.18 besuchte der Staatsminister für Finanzen, Dr. Matthias Haß, die HTW Dresden. Den Abschluss seiner Tour bildete die Vorführung des Mechlab-Teams zur vernetzten Mobilität auf dem HTW-Prüffeld. Anhand verschiedener Szenarien wurden aktuelle und zukünftige Technologien erläutert und im Fahrversuch demonstriert. Der Minister zeigte sich sehr interessiert an der Thematik, investiert doch der Freistaat Sachsen im Rahmen verschiedener Projekte erhebliche Forschungsmittel. Das Mechlab-Team konnte hier zeigen, dass diese Gelder sehr gut angelegt sind.
M.Sc. Sven Eckelmann (links, wie unschwer an der Bekleidung zu erkennen ist) erläutert dem Staatsminister (2. v.l.) die Messtechnik des Versuchsträgers:

Simulation des elektronischen Fahrpedals im BMW i3
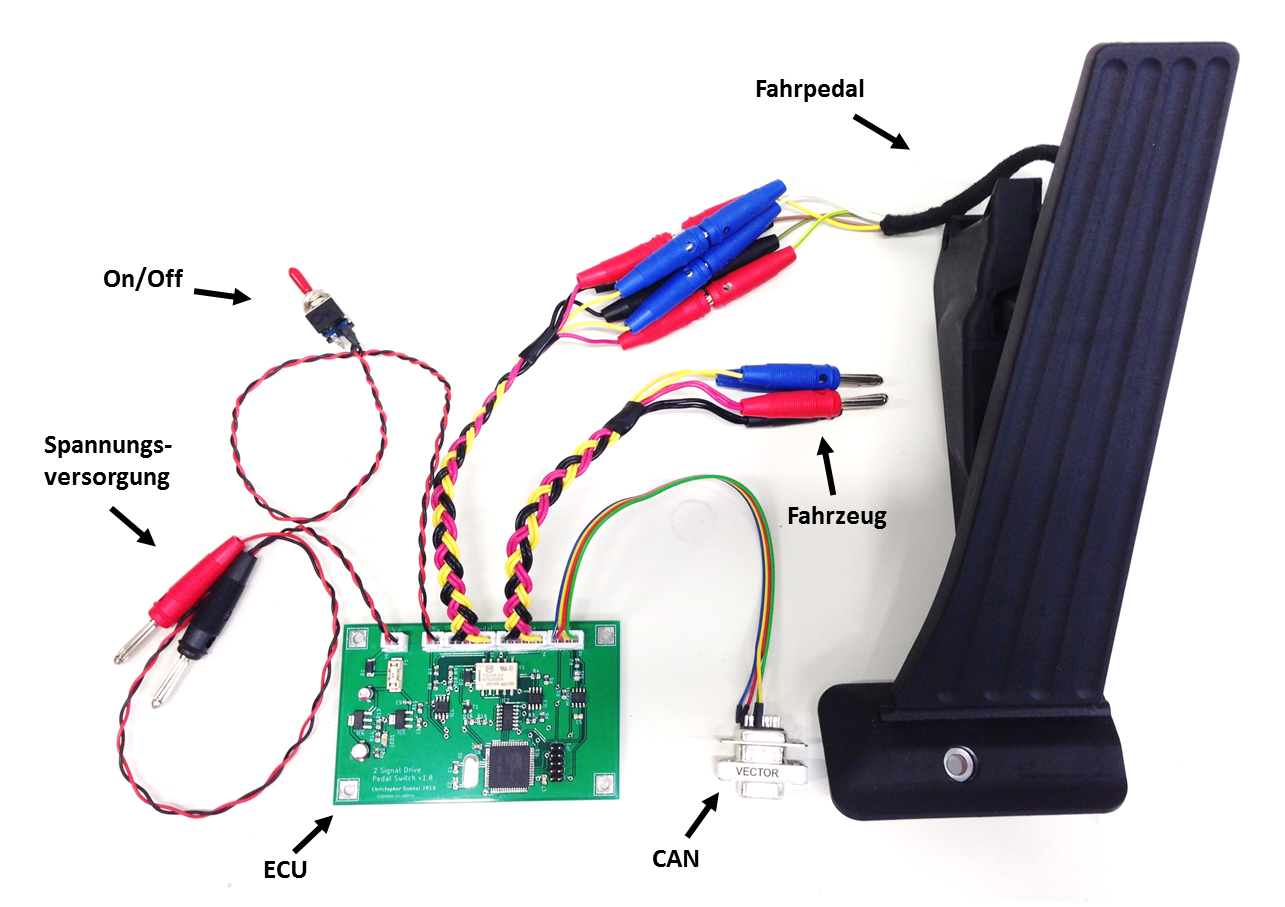
Das elektronische Fahrpedal ist Teil des Regelkreises zur Querführung in Kraftfahrzeugen. Es ermittelt permanent die Pedalstellung und gibt diese Führungsgröße an das Motorsteuergerät weiter, dessen Aufgabe darin besteht, eine dem Leistungswunsch des Fahrers entsprechende Stellgröße an die Regelstrecke zu übergeben. Im Verbrennungsmotor setzt sich das Stellglied aus den Drosselelementen des Ottomotors bzw. den Einspritzelementen des Dieselmotors zusammen, wohingegen im Elektrofahrzeug durch ein leistungselektronisches Stellglied (AC/DC-Wandler) die Gleichspannung der Hochvoltbatterie in eine n-phasige Wechselspannung für die Traktionsmaschine umgeformt wird.
Ziel dieses Projektes ist die Simulation des elektronischen Fahrpedals eines BMW i3 durch ein elektronisches Steuergerät mit Anbindung an den CAN-Bus bzw. mit Anbindung an das ROS-Framework.
[accordion]
[acc_item title=“Analyse des Fahrpedals“]
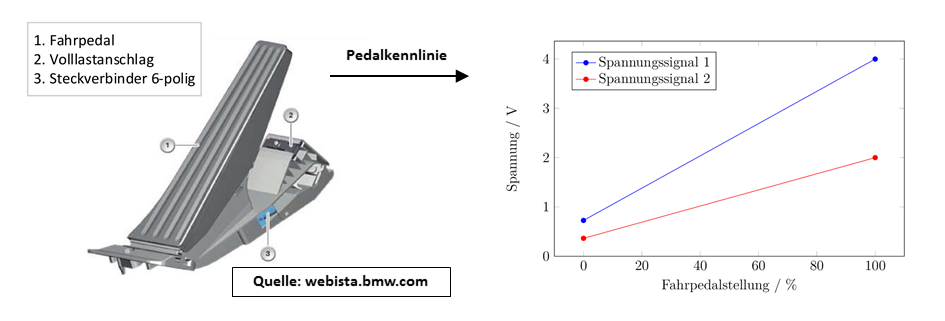
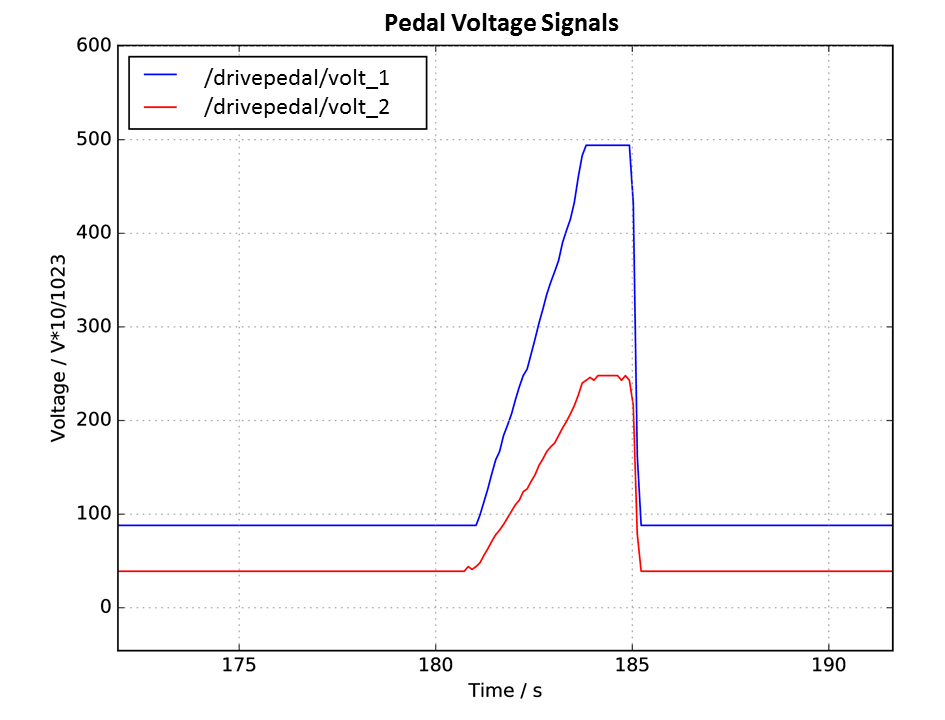
Die aktuelle Fahrpedalstellung wird zum Zwecke der Redundanz durch 2 Sensoren ermittelt und als analoges Spannungssignal übertragen. Es ergibt sich somit die dargestellte lineare Spannungskennlinie des elektronischen Fahrpedals. Die Ruhespannungen liegen bei 0,726 V für Spannungssignal 1 bzw. 0,363 V für Spannungssignal 2 und steigen bei maximaler Pedalbetätigung auf 4 V bzw. 2 V an. In Abhängigkeit der Pedalstellung x ergeben sich somit folgende Gleichungen:
[latexpage]
\begin{align*}
f(x)_{S1}=0,03274x+0,726\,[V] \\
f(x)_{S2}=0,01637x+0,363\,[V]
\end{align*}
[/acc_item]
[acc_item title=“Entwicklung des Steuergerätes“]
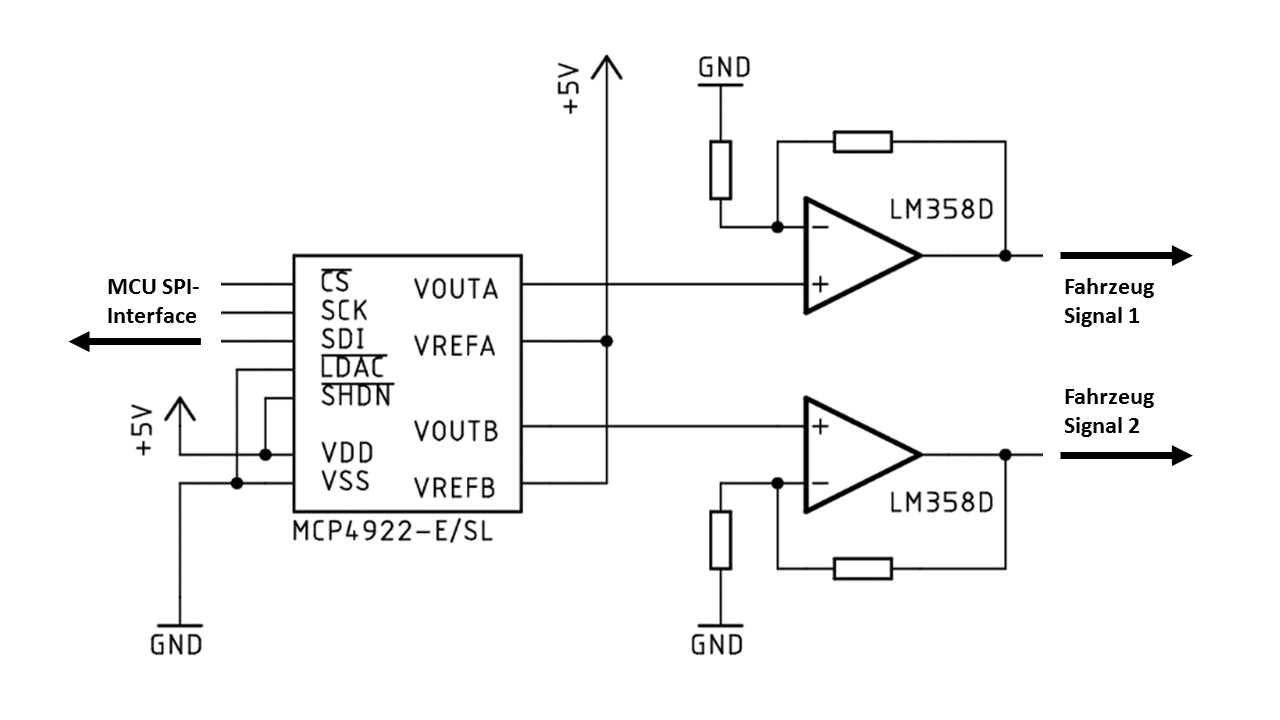
Erzeugen der Signalspannung
Die meisten kleineren Mikrocontroller sind nicht in der Lage analoge Spannungen auszugeben. Es gibt jedoch die Möglichkeit ein pulsweitenmoduliertes Signal (PWM) zu generieren und dieses anschließend durch eine nachgeschaltete Kombination aus Widerstand und Kondensator (Tiefpass) glätten zu lassen. Als nachteilig erweist sich jedoch die Tatsache, dass die Dimensionierung der Bauteile von der zu glättenden Spannung abhängt, welche sich jedoch dynamisch im Stellbereich der Gleichungen f(x)_S1 und f(x)_S2 ändert. Somit sind Oberwellen im geglätteten Spannungsverlauf nicht gänzlich ausgeschlossen. Eine weitere Alternative ist der Aufbau eines Widerstandsnetzwerkes, welches durch die freien Ports des Mikrocontrollers angesteuert wird. Die Genauigkeit hängt von der Anzahl der verwendeten Pins ab. Bspw. ergibt sich bei der Nutzung eines gesamten Ports eine Auflösung von 8 Bit (255 Werte). Da diese Auflösung sehr gering ist, stellt eine bessere Alternative die Nutzung eines externen Digital-Analog-Converters (DAC) dar, welcher über das Serial Peripheral Interface (SPI) des Mikrocontrollers angesteuert wird. Um die maximale Ausgangsspannung flexibel auszulegen und nicht auf 5 V zu begrenzen, wird die durch den MCP4922 erzeugte Spannung durch einen Operationsverstärker (OPV), welcher als nichtinvertierender Verstärker verschaltet ist nochmals erhöht.
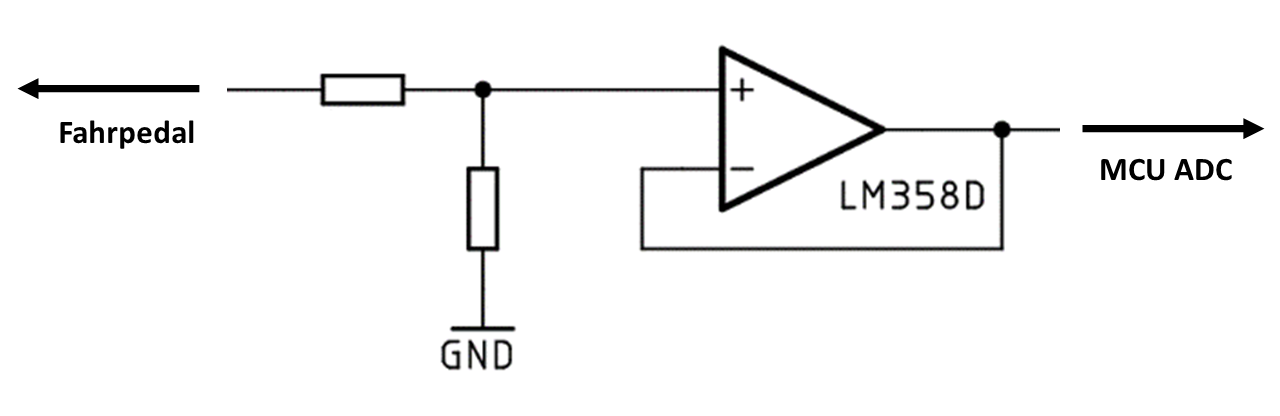
Einlesen der Signalspannung
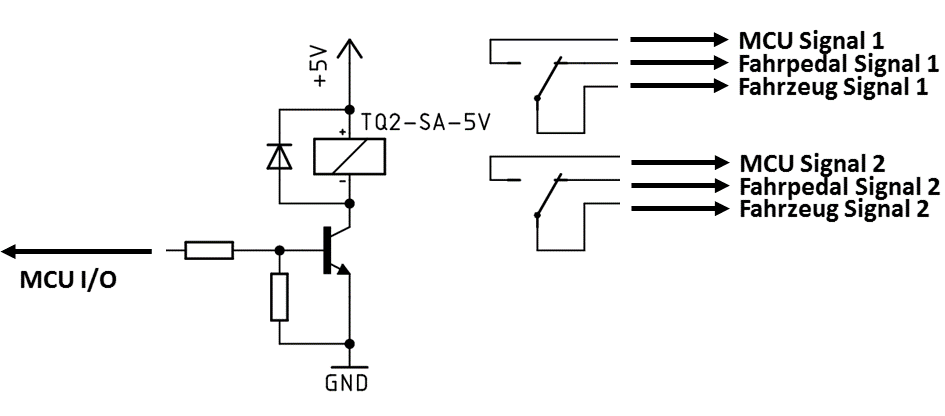
Um analoge Spannungen einzulesen, können die analogen Eingangspins des Mikrocontrollers genutzt werden. Zu beachten ist hier, dass die eingelesene Spannung zwischen 0 V und 5 V liegen muss. Zur Erweiterung dieses Bereiches auf den doppelten Spannungsbereich, kann wie in der nächsten Abbildung dargestellt ein einfacherer Spannungsteiler vorgeschaltet werden, welcher jede Eingangsspannung halbiert.
Signalumschaltung
Der Fahrer muss zu jedem Zeitpunkt die Möglichkeit haben, dass Steuergerät automatisiert oder manuell zu überstimmen. Um dieser Anforderung gerecht zu werden, muss eine Umschaltung zwischen Fahrpedal und Steuergerät stattfinden, welche im stromlosen Zustand die Verbindung zwischen Fahrzeug und Fahrpedal herstellt. Wie in folgender Abbildung dargestellt, kann dies mithilfe eines 2-Wechsler SMD-Signalrelais realisiert werden.
[/acc_item]
[acc_item title=“Inbetriebnahme“]
Die Programmierung des Mikrocontrollers erfolgt unter der integrierten Entwicklungsumgebung Atmel Studio 7 in C mithilfe des Programmier und On-Chip-Debuggers Atmel-ICE über die JTAG-Schnittstelle. Die wesentliche Aufgabe des Hauptprogrammes besteht darin, die CAN-Botschaften mit den Informationen der Fahrpedalstellung zyklisch zu versenden, die CAN-Botschaften für die Steuerung des Fahrpedals einzulesen und den DAC entsprechend der hinterlegten Fahrpedal-Kennlinie anzusteuern. Weiterhin erfolgt hier die Prüfung auf Abbruchbedingungen, welche bspw. durch den Fahrer bei laufender Simulation oder durch eine entsprechende CAN-Botschaft ausgelöst werden kann.
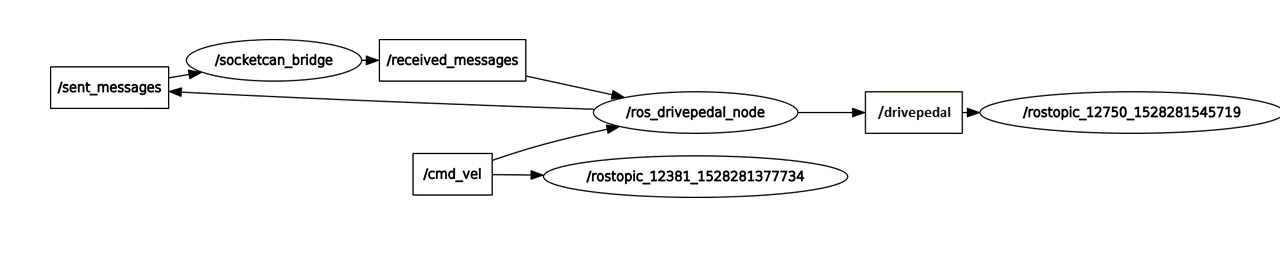
Mittels rqt_graph wird die ROS-interne Kommunikation deutlich.
- Die /socketcan_bridge ist die Verbindung zum CAN-Netzwerk. Sie kann Nachrichten senden (/sent_messages) oder empfangen (/received_messages).
- Durch den /ros_drivepedal_node werden die CAN-Botschaften verarbeitet und die Informationen des elektronischen Fahrpedals extrahiert.
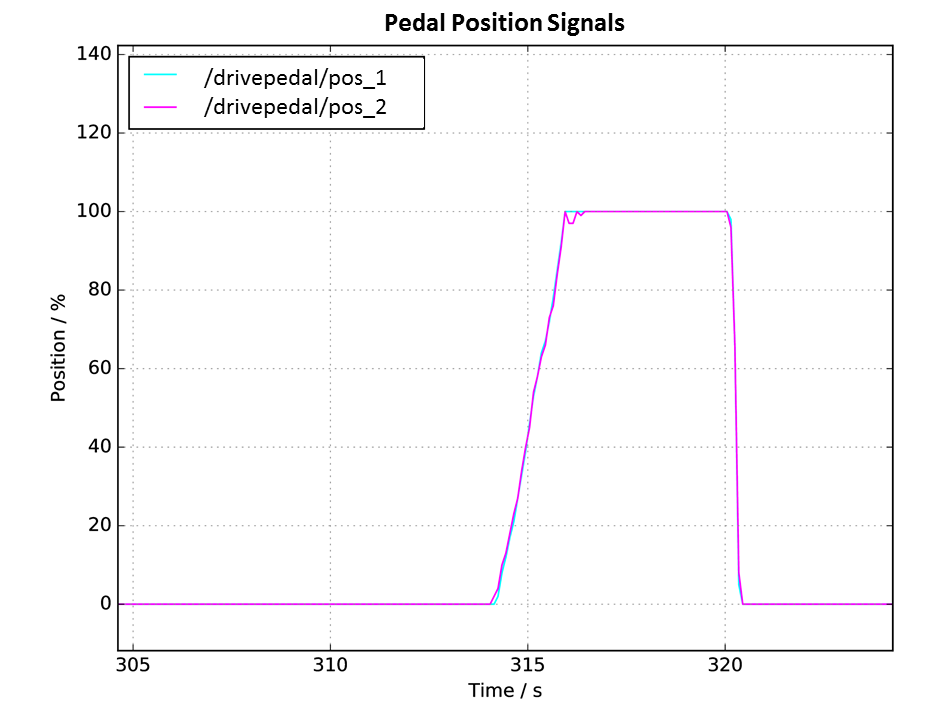
- Das topic /drivepedal enthält die Informationen der aktuellen Fahrpedalposition in Volt und Prozent.
- /cmd_vel wird verwendet um die gewünschte Fahrpedalstellung an /ros_drivepedal_node und weiterhin an die /socketcan\_bridge zu übermitteln.
[GDC_row]
[GDC_column size=“half“]
[/GDC_column]
[GDC_column size=“half“]
[/GDC_column]
[/GDC_row]
[/acc_item]
[/accordion]
HAWtech Summer School 2018
Am Mittwoch, 25.07.2018, endete der Dresdner Teil der diesjährigen HAWtech Summer School „Automotive Engineering“. Den Schwerpunkt bildete in diesem Jahr die Analyse von Messdaten mittels Matlab. Mit den Ergebnissen erstellten die Studierenden in 4 Gruppen Präsentationen, in denen sie auf ausgewählte Aspekte der Analyse eingingen. Die Videos sind im YouTube-Kanal des Labors abrufbar (Click to Open).
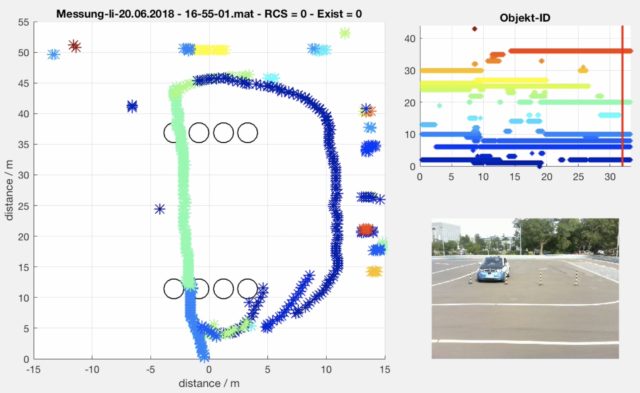
Erste Messungen mit Fernbereichs-Radarsensor
Zur Erweiterung der messtechnischen Kompetenz wurden im Rahmen des Projektes GewaF neue Radarsensoren der Fa. Continental angeschafft. Nach einigen Startschwierigkeiten bei der Einbindung der Sensoren in die Messumgebung Vector-Canape konnten nun erste systematische Test erfolgen. Das nachfolgende Video zeigt eine Messfahrt mit den einzelnen Objektdetektionen. Wie an der Farbe zu erkennen ist, erfolgt kein durchgehendes Tracking des Objektes mit einer ID. Dies muss in der nachfolgenden Datenfusion oder einem zusätzlichen Tracking erfolgen.
Zum Start des Videos bitte auf das Bild klicken.
Koreanische Delegation und VDI zu Besuch
 Am 22.05.18 besuchte eine Delegation der südkoreanischen Straßenverkehrsbehörde (Korea Transportation Safety Authority) das Mechlab-Team. Unter Führung von Behördenpräsident Byung Yoon Kwon gab es einen regen Erfahrungsaustausch zu aktuellen und künftigen Prüfmöglichkeiten für Fahrerassistenzsysteme und automatisierte Fahrzeuge. Dabei wurde sowohl auf bestehende Mechlab-Patentanmeldungen (EP000003052919B1, DE102016100156A1) zu praxisnahen Prüfverfahren eingegangen als auch die neuen Testmöglichkeiten im Rahmen der sächsischen Initiative zu intelligenten Verkehrssystemen.
Am 22.05.18 besuchte eine Delegation der südkoreanischen Straßenverkehrsbehörde (Korea Transportation Safety Authority) das Mechlab-Team. Unter Führung von Behördenpräsident Byung Yoon Kwon gab es einen regen Erfahrungsaustausch zu aktuellen und künftigen Prüfmöglichkeiten für Fahrerassistenzsysteme und automatisierte Fahrzeuge. Dabei wurde sowohl auf bestehende Mechlab-Patentanmeldungen (EP000003052919B1, DE102016100156A1) zu praxisnahen Prüfverfahren eingegangen als auch die neuen Testmöglichkeiten im Rahmen der sächsischen Initiative zu intelligenten Verkehrssystemen.
Weiterhin erfolgte an diesem Tag ein Besuch der Leiter der VDI-Landesgeschäftsstellen. Auch hier wurden Details zur Sensorik für automatisierte Fahrfunktionen vorgestellt. Das Mechlab-Team gibt seit diesem Jahr VDI-Schulungen zu genau diesem Thema. Im Bild zu sehen ist die Punktwolke des 360°-Laserscanners, der als Kerntechnologie für urbane Automatisierung gilt.

ROS RC-Car: Autonomes Fahrzeug im kleinen Format
Die Idee
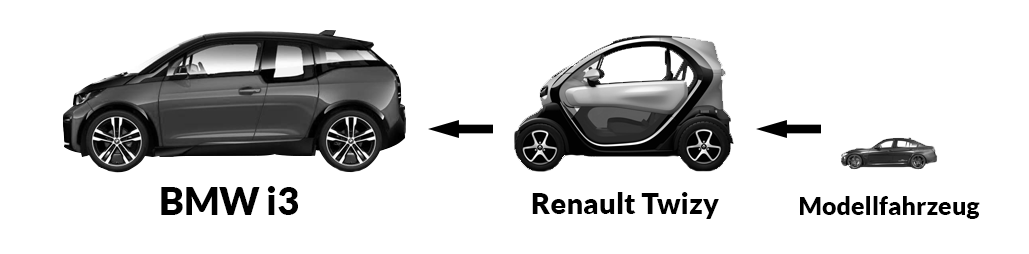
Eines der langfristigen Ziele der Forschungsgruppe NIVES ist die Evaluation und Fusionierung von Sensorik für autonome Fahrfunktionen. Dafür besitzt die Hochschule bis dato zwei Fahrzeuge, einen BMW i3 und einen Renault Twizy. Beide Fahrzeuge sind bereits zum Teil mit Sensoren und Aktuatoren ausgestattet worden um die grundlegenden autonomen Fahrfunktionen (Beschleunigen, Bremsen, Lenken) ohne menschliches Eingriff durchführen zu können. Durch die fortschreitende Entwicklung von Algorithmen für autonome Fahrfunktionen und dem noch nicht abgeschlossenen Umbau der verfügbaren Fahrzeuge entstand die Idee ein schnell einsatzbereites kleines Modellfahrzeug zu nutzen um sowohl die Algorithmen als auch das Gesamtsystem in einer natürlichen Umgebung, auf dem hauseigenen Testfeld der HTW Dresden, zu testen.
Die Vorteile eines Modellfahrzeugs sind:
- robust gebaut (eventuelle Fehler in den Algorithmen und resultierende Crashs sind bei einem RC-Auto harmlos)
- schnell einsatzbereit, tragbar
- kostengünstiger Umbau (meiste Sensorik durch andere Projekte bereits vorhanden)
- skalierbar (Algorithmen die auf das RC-Modell sinnvoll skaliert sind funktionieren auch im „echten“, großen Fahrzeug)
- benötigt wenig Platz (Testfahrten auf Testfeld nicht unbedingt nötig, Testfahrten im Gebäude leicht möglich)
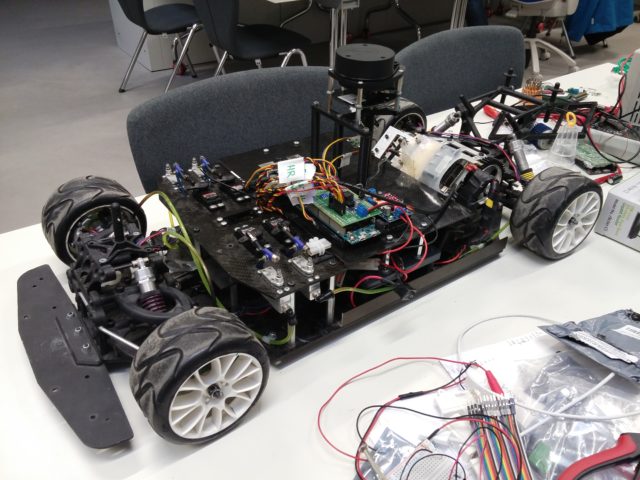
Die Basis
Als Basis dient ein 1:5 RC-Modell (Remote Control, Ferngesteuert), welches vor einigen Jahren für Studentenpraktika und Lehre angeschafft wurde. Es war bereits mit einem kräftigen Motor, einem Motortreiber, Servomotor an der Lenkachse, sowie vier weiteren Servomotoren zum Abbremsen jedes einzelnen Rades und Drehzahlsensoren ausgestattet. Schnell zeigte sich jedoch, dass der verbaute Motor für die geplanten autonomen Fahrsituationen, wie zum Beispiel Einparken und sanftes Anfahren, ungeeignet war. Vielmehr war das Modell auf Geschwindigkeiten von ca. 60km/h im Rahmen von dynamischen Fahrversuchen (ABS, ESP) ausgelegt, was zum Entschluss führte neben der vollständigen Überarbeitung der Elektronik und dem Einbau eines Computers auch den Antriebsstrang zu verändern.
Basis-Hardware:
- 1:5 Modellfahrzeug
- Heckgetrieben
- Servomotor an Lenkachse
- Hydraulische Bremsen für jedes Rad
- Drehzahlsensoren für jedes Rad
Auszumusternde Basis-Hardware:
- Brushless-Motor mit Brushless-Motortreiber
- NiMH Akkus 12v, 4000mAh
- PCB zur Ansteuerung des Systems mit MatLab
Die ungeeignete Hardware sollte im folgenden Umbau im Rahmen der „Modernisierung“ zum autonomen Fahrzeug weichen.

Elektronik
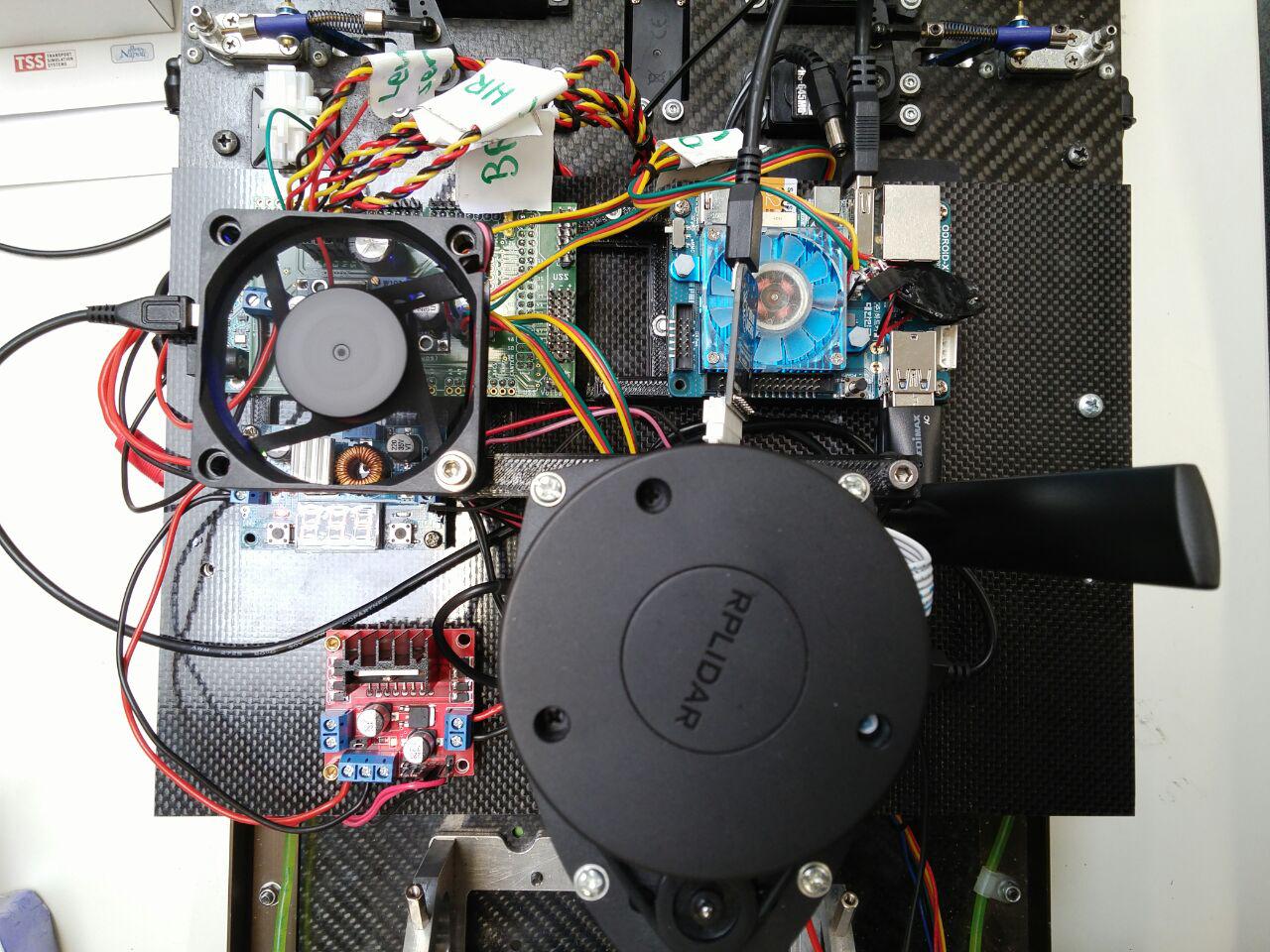
Als leistungsstarker Kleinstcomputer wurde ein Odroid XU4 verbaut. Er zeichnet sich gegenüber einem Raspberry Pi 3 durch doppelt so viel RAM und einer wesentlich stärkeren CPU aus. Der Computer dient zur Berechnung der teils komplexen Fahrmanöver und erlaubt die Kommunikation mit anderen Computern in einem verfügbaren WLAN-Netzwerk.
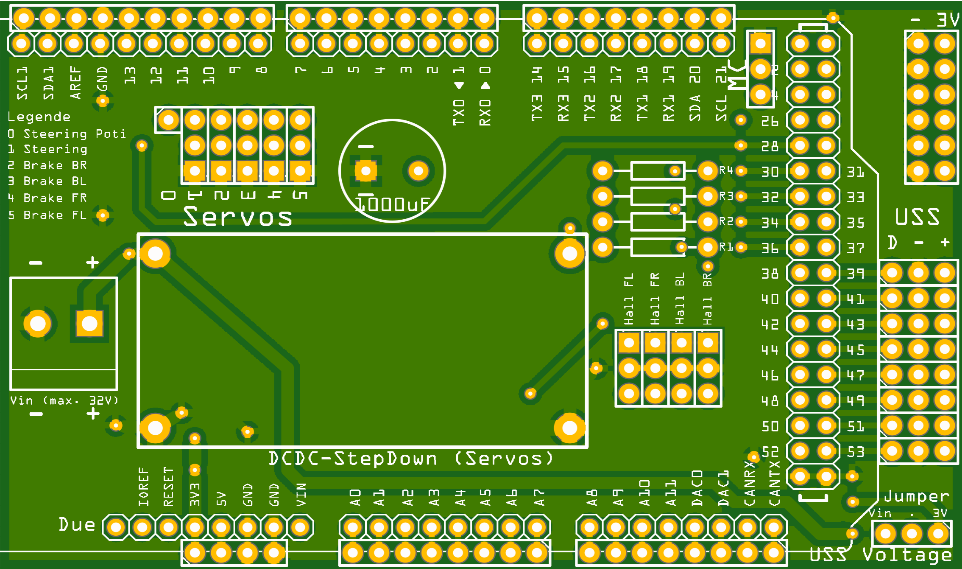
Die Ansteuerung der Motoren und Auslesen der Sensoren erfolgt mithilfe eines Arduino Due, welcher per USB-Seriell-Schnittstelle mit dem Odroid kommuniziert. Für ein einheitliches und „aufgeräumtes“ Kabelmanagement wurde für den Arduino Due eine Aufsteckplatine entworfen, welche alle Motoren und Sensorsysteme auf einer Platine zentral zusammenführt. Darüber hinaus ist die Aufsteckplatine mit bis zu acht Ultraschallsensoren erweiterbar.
Umbau
Im folgenden wird der Umbau in mehreren Stufen beschrieben.
Umbauten Stufe 1
- Schaffung einer neuen Ebene zur Montage der Elektronik (Carbonplatte) mit Montagesäulen aus dem 3D-Drucker
- Nutzung der großen Kammer unter der Carbonplatte zur Anbringung der neuen Akkus und Kabelmanagement
- Montage eines RPLidar 360° Laserscanners mithilfe 3D-gedruckter Bauteile
- Planung und Bestellung eines PCB als Aufsteckplatine für den Arduino Due
- Montageplatte für die Elektronik erstellt und 3D-gedruckt
Umbauten Stufe 2
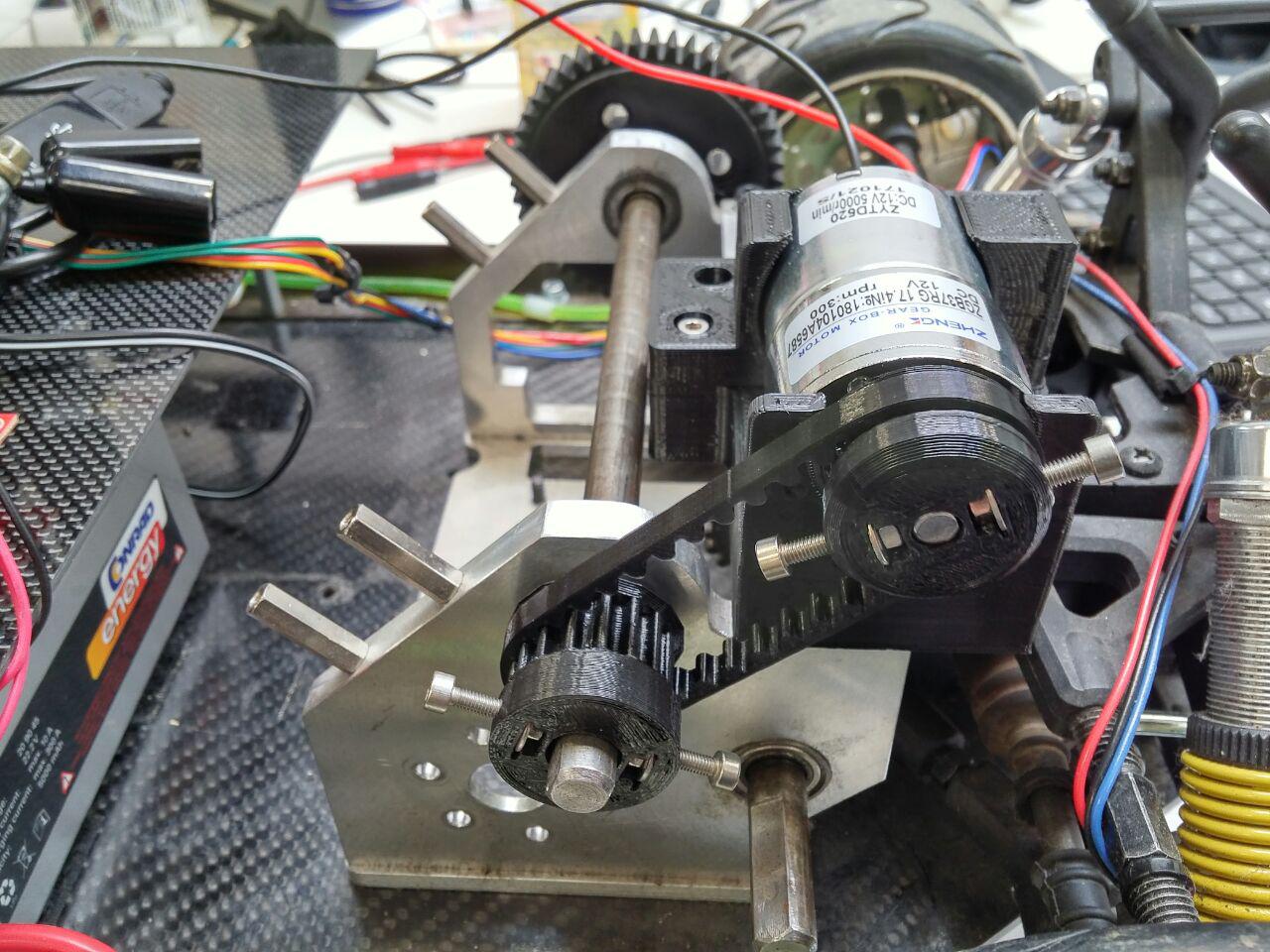
- Ersetzen des vorhandenen Brushless-Motor mit geeignetem DC-Getriebemotor (erlaubt langsame Bewegung)
- 3D-Druck von Zahnriemenrädern (PETG) und Zahnriemen (TPU) mit dem Zahnprofil HTD, sowie einer Motorhalterung
- Unterbringung des DC-Schrittmotortreibers
- Lüfter zur Kühlung der Spannungswandler
- Einbau eines leistungsstarken LiPo-Akkus (6s mit 5000mAh), entfernen der wesentlich schwereren NiMH Akkus
- Anpassung der Modellfahrzeugkarosserie auf die verbaute Hardware (Ausschnitte für Laserscanner)


Der Artikel wird zukünftig fortlaufend aktualisiert. Es folgt in Kürze der Bericht zur Umbaustufe 3.
Besuch Berufsschulklasse aus Nordhausen
Im Rahmen der Nachwuchsförderung haben uns heute 25 Auszubildende der Kfz-Mechatronik im zweiten Lehrjahr von der Berufsschule Nordhausen besucht.
Kernthemen waren die Vorstellung unserer Versuchsfahrzeuge BMW i3 und Renault Twizy mit der verbauten Messtechnik und Umfeldsensorik, sowie eine kurze Einführung in die Welt der Robotik.

Nach einem Fahrversuch zum Thema Car2X-Kommunikation auf unserem Test- und Prüffeld, demonstrierte Patrick Richter den interessierten Azubis eine Eigenentwicklung zum automatisierten Test von Fahrzeugumfeldsensorik.

Im Fokus der Veranstaltung stand die Vermittlung von Grundlagenwissen zu Fahrzeugkommunikationsstrukturen und -Umfeldsenorik. Die Versuchsfahrzeuge bildeten in diesem Zusammenhang eine direkte Schnittstelle zur praktischen Anwendung der jeweiligen Systeme.
Mechlab-Team gibt erstmals VDI-Schulung
Am 13.03.2018 findet die erste VDI-Schulung des Mechlab-Teams unter Leitung von Prof. Dr. rer. hat. Toralf Trautmann statt. Unter dem Titel „Umfeldsensorik im Fahrzeug“ erhalten die Teilnehmer einen Einblick in aktuelle und künftige Sensoren für die Erkennung des Fahrzeugumfeldes. Am zweiten Tag wird durch Dozenten des FKA Aachen das Thema „Sensordatenfusion“ behandelt.
