Im Rahmen der Wissenschaftlichen Fachvorträge der Studenten des 7. Semesters Fahrzeugtechnik trägt heute Herr Christian Rohde zum Thema „Umfeldsensorik mit dem Lidar: Vor- und Nachteile ggü. Radar“ vor.
Umfeldsensorik mit dem Lidar
Im Rahmen meines Studiums zum Dipl.-Ing. (FH) habe ich im siebten Semester einen Fachvortrag über die Lidar-Sensoren gehalten. In diesem Artikel möchte ich nun eine Zusammenfassung meiner erarbeiteten Kenntnisse darstellen und versuche dies, so einfach wie möglich zu gestallten.
In fast jedem Automobil finden wir heute Fahrerassistenzsysteme (FAS). Sie sollen die Fahrer in verschiedensten Verkehrssituationen unterstützen oder entlasten und dienen somit als Sicherheits- oder Komfortsystem. Die Umfeldsensoren stellen dabei die Grundlage für die FAS wie Einparkhilfe, Nachtsichtverbesserung, Adaptive Cruise Control (ACC) oder den Notbremsassistenten dar.
Als ich dieses Thema bearbeitet habe, ist mir aufgefallen, dass viele das Lidar noch gar nicht kennen. Das liegt zum einen daran, dass es eine relativ junge, noch in der Forschung steckenden Technologie im Automobil ist und zum anderen sich gegenüber dem Radar noch nicht weiter durchgesetzt hat.
Lidar bedeutet ausgesprochen Light Detecion and Ranging und sind Sensoren der optischen Detektion. Mit diesen Sensoren kann man also die Entfernung von Objekten messen. Sie stellen eine alternative zu den radarbasierten Systemen dar.
In diesem Artikel habe ich eine Trennung zwischen dem einfachen Lidar-Sensor und dem Laserscanner vorgenommen. Ein mir bekannter Serieneinsatz für den Lidar-Sensor ist der Notbremsassistent im Ford Focus, bei dem sich der Sensor hinter der Frontscheibe im Bereich des Rückspieles befindet. Laserscanner finden zur Zeit nur Einsatz in Forschungsfahrzeugen wie „Leonie“ der TU Braunschweig oder der Smart des Mechatroniklabor der HTW Dresden.
Funktionsweise
Lidar-Sensor
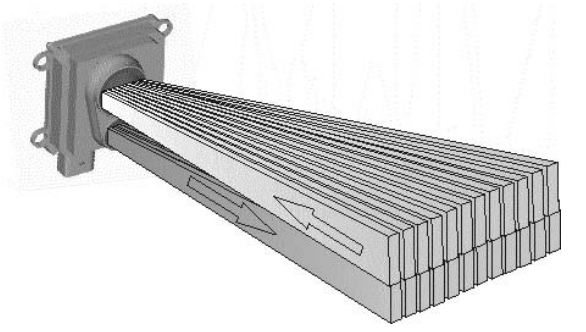
Lidar-Sensoren erfassen das vordere Umfeld des Fahrzeuges mit Infrarot-Laserstrahlen. Dabei wird zur Messung der Entfernung von Objekten und zur Ermittlung der Relativgeschwindigkeit das Licht-Laufzeitverfahren genutzt (siehe Messverfahren). Der hier dargestellte Sensor der Firma Hella sendet nach dem Mehrstrahlprinzip insgesamt 12 Strahlen aus. Realisiert wird dies durch mehrere unabhängige Sendekanäle. Die gleiche Anzahl der Empfangskanäle empfangen die vom Objekt reflektieren Strahlen und die Elektronik wertet diese Informationen aus. Durch die Strahlbreite ergibt sich die Winkelauflösung und durch die Anzahl der Strahlen der laterale Öffnungswinkel. Die Reichweite des Systems beträgt dabei mehr als 150 m.[1][2]


Laserscanner
Eine Weiterentwicklung zum einfachen Lidar-Sensor stellt der Laserscanner dar. Der Laserscanner entsendet dabei ebenfalls wie der Lidar-Sensor Lichtimpulse und wertet die vom Objekt zurückgesendeten Strahlen über das Lichtlaufzeitverfahren aus. Die grundlegende Erweiterung des Laserscanners besteht darin, dass die erzeugten Laserstrahlen durch einen drehenden Spiegel abgelenkt und über den zu scannenden Bereich verteilt werden. Somit entsteht eine detaillierte Umgebungskarte von den vor dem Fahrzeug befindlichen Objekten. [3]
Ein Beispiel hier ist der Laserscanner der Firma Ibeo. Der Laserscanner Alasca XT wurde entwickelt, um eine Vielzahlt von Fahrerassistenz-Anwendungen in einem Fahrzeug zu Implementieren. Mit einem Sichtberich von 240 Grad, einer Reichweite von 200 m und einer Auflösung von 1/8 Grad stellt dieser Laserscanner eine hervorragende Plattform für Fahrerassistenzsysteme dar. Zur Kompensation von Nickbewegungen werden vier Zeilen Gleichzeitig abgetastet, so dass ein Führungsfahrzeug unabhängig von Bodenwellen und Fahrdynamik vermessen werden kann.[3]

Messverfahren
Ermittlung des Abstandes
Das am häufigsten verwendete Messverfahren zur Abstandsmessung ist die „Time of Flight-Messung“. Bei dieser Messung wird die Zeitdauer gemessen, die vom aussenden des Licht(Laser)-Impuls bis zum Empfangen der zurückgesendeten Strahlen vergeht. Diese Zeit ist dabei proportional zur Entfernung zwischen Messsystem und detektierten Objekt. [1]

Ermittlung der Relativgeschwindigkeit
Um die Relativgeschwindigkeit eines relevanten Objektes zu messen, wird die Abstandsmessung zu Grunde gelegt. Man bedient sich der einfachen Differentiation von zwei oder mehreren aufeinander folgenden Abstandsmessungen. Dieses Verfahren ist jedoch nur möglich, da der Abstand sehr genau gemessen werden kann.[2]

Probleme
Natürlich gibt es bei dieser Technik und diesen Messverfahren auch Probleme, welche nachfolgend dargestellt werden.
Dämpfung der Atmosphäre
Bewegt sich ein Lichtstrahl durch die Atmosphäre, so wird dieser durch deren Bestandteile wie Staub und ihren Aggregatezustand wie Nebel gedämpft. Dabei wird der Lichtstrahl durch Absorption, Streuung, Beugung und Reflexion abgeschwächt. Dieser Sachverhalt kann mit folgendem Zusammenhang beschrieben werden.
![]()
Die Formel beschreibt die Lichtleistung, welche wieder am Empfänger ankommt Φt . Der Sender sendet eine Lichtleistung mit Φ0 aus. Dabei wird ein Teil der Lichtleistung durch die Bestandteile in der Atmosphäre diffus reflektiert Φr und ein Teil der Lichtleistung wird absorbiert Φa , d. h. in Wärme umgewandelt.
Damit die Dämpfung der Atmosphäre gering gehalten wird, kann als Abhilfe die Sendeleistung erhöht, oder der Strahl stärker gebündelt werden. Ebenfalls ist es auch möglich, die Empfindlichkeit des Empfängers zu erhöhen.[1]
Diffuse Reflexion
Trifft der Lichtstrahl auf das zu messende Objekt, wird er diffus reflektiert, d.h. die Rückstreuung erfolgt kugelförmig in eine 180 Grad Raumwinkel (siehe Abbildung). Der Empfänger kann aber nur die Lichtleistung nutzen, die direkt zurückgestrahlt wird. Dabei beträgt die Lichtleistung, die dann nach der Dämpfung durch die Atmosphäre und die diffuse Reflexion am Empfänger wieder ankommt oft weniger als 20 %.[1]

Totale Reflexion
Wird jedoch ein Licht(Laser)-Strahl zu sehr gebündelt, kann es beim auftreffen auf eine ebene, spiegelnde Fläche am Fahrzeugheck zur totalen Reflexion kommen. In diesem Moment wird das Objekt für den Empfänger unsichtbar. [1]

Zu erkennen ist, das die Maßnahmen zur Abhilfe der Probleme eher kontraproduktiv sind oder Mehrkosten durch Verbesserung der Komponenten verursachen.
Gegenüberstellung Radar – Lidar
Radarsensor – Vor- und Nachteile
Vorteile
– Wettereinflüsse wirken sich gering auf Sensor aus (keine oder wenig Beeinflussung durch Regen oder Nebel)
– Unabhängig vom Tageslicht
– Messung der Relativgeschwindigkeit über Dopplereffekt
– Keine beweglichen Teile am Sensor und somit geringere Anfälligkeit gegenüber Erschütterungen
– Kleine, Kompakte Bauweise
Nachteile
– Liefert nur Punktinformationen
– Kleiner Erfassungsbereich in Bezug auf die Entfernung
– Störeinflüsse durch Sensoren des gleichen Typs möglich
– Messung in vertikaler Achse ungenau, kein Ausgleich von Fahrzeugneigung (LKW Heck und LKW Hinterachse)
– Erkennung von Phantomobjekten möglich
Lidar-Sensor – Vor- und Nachteile
Vorteile
– Hohe Messauflösung in Bezug auf Entfernung und Winkel (Konturen der Objekte werden erkannt, Eindeutige Erkennung von Fahrzeugen)
– Störfest gegenüber Einflüssen von Sensoren gleichen Typs
– Unabhängig von Tageslicht
– Erkennung von Witterungsbedingungen
– Großer Erfassungsbericht im Bezug auf Entfernung und Winkel
– Höhenmessung bzw. Ausgleich von Fahrzeugneigung durch mehrere, übereinander liegende Lagen
Nachteile
– Anfällig gegenüber Witterungsbedingen
– Mechanisch Bewegliche Teile
– Fehlende Geschwindigkeitsinformation
– Laserscanner noch große Bauform
Fazit
Für Fahrerassistenzsysteme sind Radar- und Lidar-Sensoren nicht mehr wegzudenken. Was dem einem System die Vorteile sind, sind dem anderen die Nachteile. Deshalb ist eine Fusion der Sensordaten erstrebenswert. Eine Möglichkeit besteht darin die Daten von Radar, Lidar und Kamera zu vereinen und durch mehrere Sensoren die Nachteile der einzelnen Systeme zu kompensieren.
Radarsensoren sind heute schon gut in das Design der Fahrzeuge eingeflossen. Lidar-Sensoren stellen eine kompakte und preiswerte Alternative für den Kleinwagen und Mittelklassewagen dar. Laserscanner dagegen müssen von ihrer Bauart her noch kompakter werden, damit diese ebenfalls gut in das Design der Fahrzeuge integriert werden können. Dabei ist es Denkbar, das Laserscanner in der Fahrzeugfront rechts und links im Stoßfänger oder in den Scheinwerfern verbaut werden können.
Weitere sehenswerte Links
WDR – Sendung mit der Maus – Autopilot
Quellen
[1] Hermann Winner, Stephan Hakuli, and Gabriele Wolf, Handbuch Fahrerassistenzsysteme.: Vieweg+Tebner, 2009.
[2] Prof. Dr. rer. nat. Toralf Trautmann, Grundlagen der Farzeugmechatronik.: Vieweg+Tebner, 2009.
[3] Max Mandt-Merck, „Sieben Anwendungen mit einem Sensor,“ ATZ elektronik, no. 02/2006, Feb. 2006.