

Im Rahmen unseres Praxissemesters haben wir (Peter Hoffmann und Joachim Delius) uns mit der Umsetzung einer Spurerkennung, einer Sinusfahrt und einer Kreisfahrt an einem Modell LKW beschäftigt. Die Vorgabe war es verschiedene Anwendungen an dem LKW zu realisieren und Daten der Beschleunigung um die X-Achse, Y-Achse, Z-Achse sowie die Gierrate aufzunehmen und grafisch darzustellen.
Fahrzeug
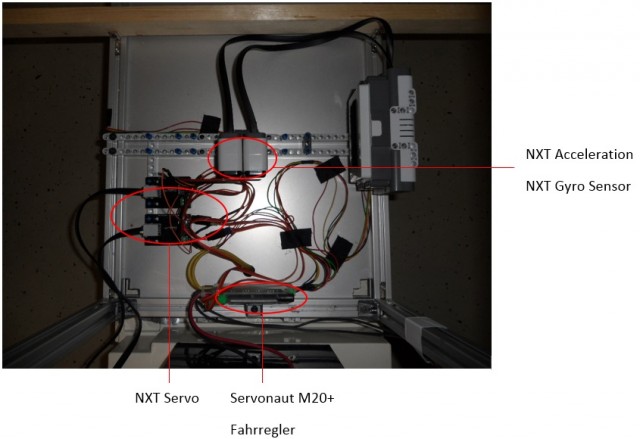
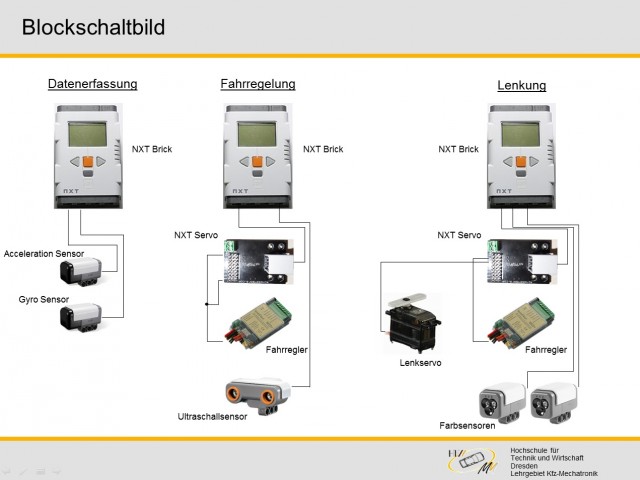
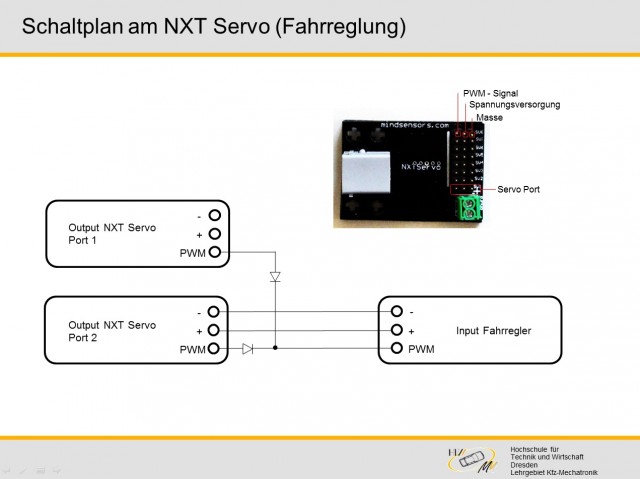
Den LKW haben wir fahrtüchtig und ausgerüstet mit einem Servonaut M20+ Fahrregler bekommen. Das Modell hat eine angetrieben Achse und ist über Blattfedern vollgefedert. Wir haben angefangen einen Lego NXT Brick zu verbauen und den original Fahrregler mit Hilfe eines NXT Servos anzusteuern. Dieses funktionierte erst als 2 PWM-Signale des NXT Servos zum Fahrregler gesendet wurden. Da der Fahrregler das PWM-Signal zum Fahren in kürzeren Abständen benötigt als der NXT Brick dieses sendet. Zusätzlich haben wir ein Ultraschallsensor verbaut, der ein Abstandsignal sendet. Durch diesen Sensor war es uns möglich das Fahrzeug vor einer Kollision zu stoppen.
Linienführung
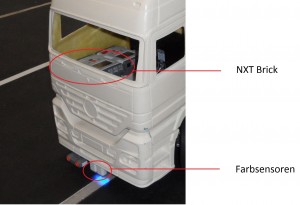
Bei der Umsetzung der Spurerkennung haben wir einen zweiten NXT Brick verwendet der die Sensorsignale des Farbsensors empfängt, weiterverarbeitet und die Ausgangssignale an den Lenkservo weiterleitet. Die Weiterverarbeitung haben wir mit einem selbst geschrieben Programm unter LabVIEW gelöst. Die Regelung wurde mit Hilfe eines PID-Reglers genau auf die Anforderungen abgestimmt. Die Signale der beiden Sensoren werden miteinander verglichen und so die Fahrtrichtungsänderung, sowie der Lenkeinschlag berechnet.
Sinusfahrt
Bei der Sinusfahrt haben wir denselben Aufbau genutzt nur das Programm der Lenkungsansteuerung so umgeschrieben, dass der Lenkservo mit einer Sinusschwingung angesteuert wird. Die Frequenz der Schwingung ist einstellbar, so dass verschiedene Fahrzustände realisiert werden konnten. Besonders interessant ist der Unterschied zwischen untererregt, übererregt und dem Resonanzfall bei unterschiedlichen Beladungszuständen. Die unterschiedlichen Beladungszustände wurden mit Wasser gefüllten Kanistern bewerkstelligt. Die Resonanzfrequenz haben wir Experimentell ermittelt.
Kreisfahrt
Bei der Kreisfahrt haben wir mittels eines LabVIEW Programms einen festen Lenkwinkel und eine Geschwindigkeit vorgegeben und den Beladungszustand des LKW Modells geändert um die Auswirkungen auf das Fahrverhalten darzulegen. Die unterschiedlichen Beladungszustände wurden wieder mittels gefüllten Kanistern realisiert.
Messwertaufnahme/-auswertung
Um die Messwertaufnahme zu realisieren wurde ein dritter NXT Brick mit einem Acceleration Sensor und einem Gyro Sensor verbaut.
Auf dem NXT Brick läuft auch ein selbst geschriebenes LabVIEW Programm, welches die Messwerte in Bezug zurzeit in eine Textdatei schreibt. Diese aufgezeichneten Daten wurden mittels Microsoft Excel aufgearbeitet und zur weiteren Bearbeitung mit MATLAB vorbereitet. Die Videomitschnitte wurden mit einer GoPro Hero 2 aufgezeichnet. Mit einem selbst entwickelten MATLAB Programm wurde nun die aufbereiteten Daten sowie die Videomitschnitte zusammengeführt und optisch dargestellt. Durch diesen Schritt sind die einzelnen Situationen sowie die Auswirkungen der einzelnen Randbedingungen sehr gut ersichtlich geworden.
Linienführung
httpvh://www.youtube.com/watch?v=4WofhZKrjpQ
Sinuslenkung
httpvh://www.youtube.com/watch?v=vRKCOLn-PtU