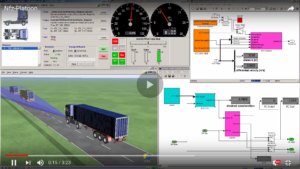
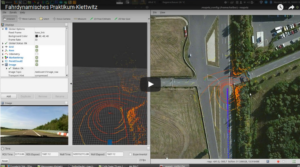
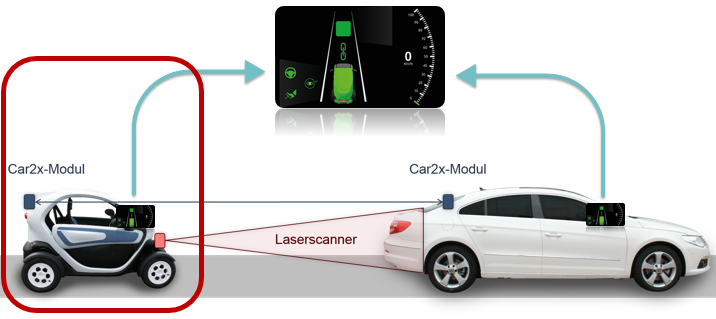
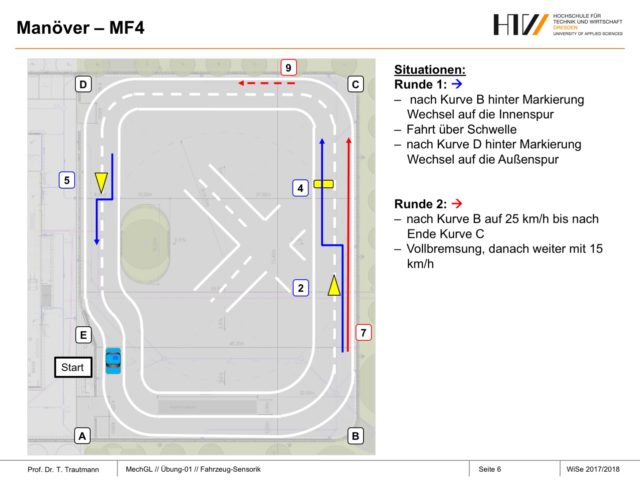
In der Kalenderwoche 43 startete das neue Praktikum im Rahmen der Vorlesung „mechatronische Grundlagen“ für das 3. Semester der Fahrzeugtechniker. Die Studierenden konnten erstmals das Prüffeld für vernetzte und automatisierte Fahrfunktionen im Einsatz erleben. Jeder Student mit gültigem Führerschein absolviert im Versuchsfahrzeug BMW i3 zwei Runden, in denen er verschiedene Fahrmanöver ausführen muss. Jede der insgesamt vier Studiengruppen hat dabei leicht veränderte Aufgaben. Die nachfolgende Grafik zeigt die zu absolvierenden Manöver für die Gruppe 4. Mit einem Klick auf das Bild gelangt man zum Video einer Messfahrt.
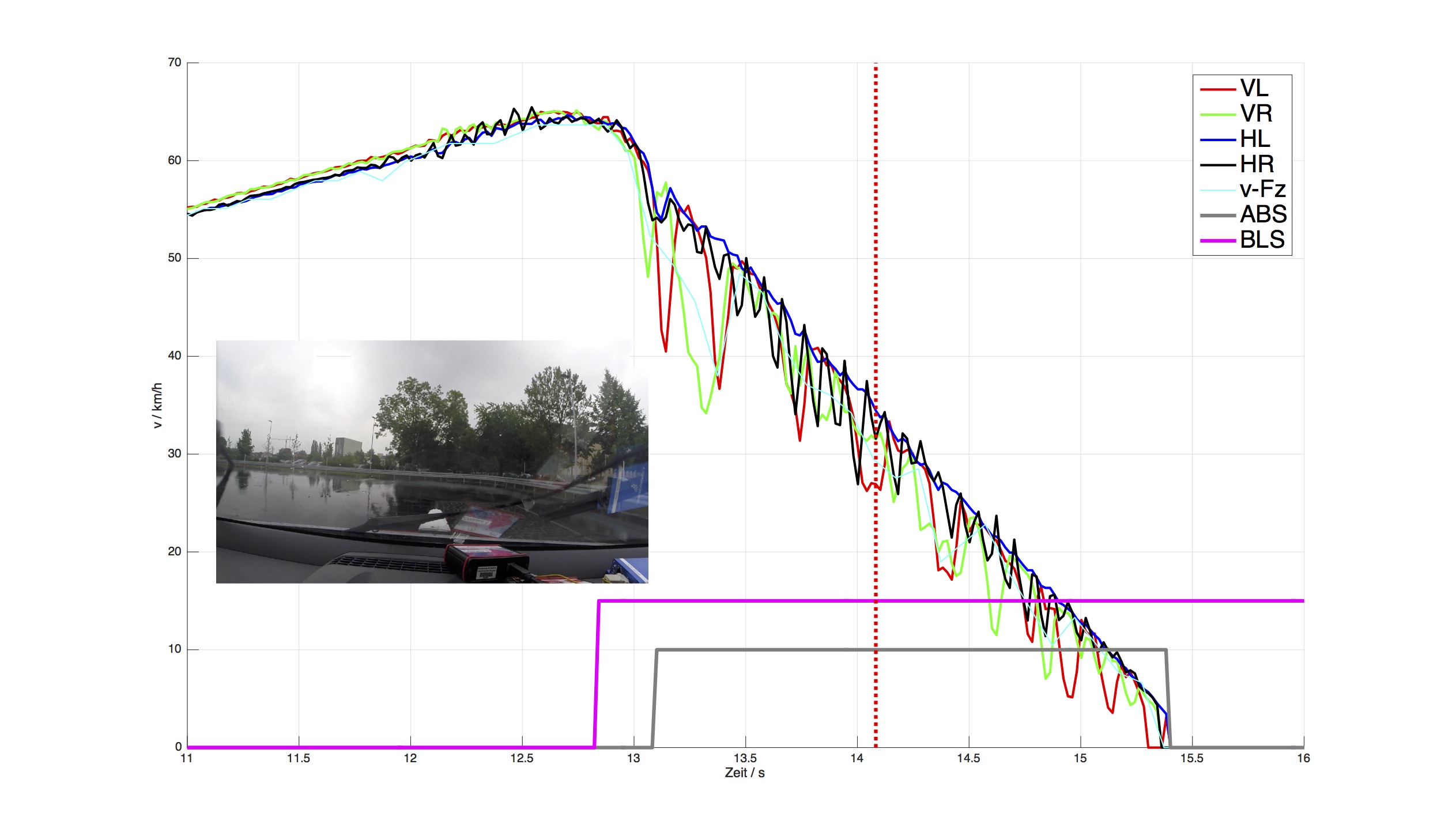
Während sich eine Gruppe auf dem Prüffeld der Fahraufgabe widmet, erarbeitet sich die zweite Gruppe die informationstechnischen Grundlagen zur automatisierten Auswertung der anfallenden Messwerte mit MatLab.

Ziel ist es, den Studierenden den Umgang mit großen Datenmengen (DERZEITIGES Schlagwort: BIG DATA) näherzubringen. In einer vernetzten Fahrzeugwelt fallen immer größere Datenmengen an, die sicher und nachvollziehbar ausgewertet werden müssen. In den nächsten Semestern werden die Versuche systematisch erweitert, so dass die Fahrzeugtechnik-Absolventen der HTW Dresden bestens auf die zukünftigen Aufgaben in der Fahrzeugentwicklung vorbereitet sind.