Die Nachwuchsforschergruppe soll auf dem wissenschaftlich besonders anspruchsvollem Gebiet der sehr genauen Erkennung von Verkehrsobjekten neue Konzepte entwickeln, bewerten und prototypisch umsetzen. Mit den erzielten Ergebnissen wird es möglich sein, bisherige Schutzsysteme im Fahrzeug deutlich zu verbessern und neue Systeme zu entwickeln. Primäres Ziel ist dabei die weitere Erhöhung der Verkehrssicherheit durch die Reduzierung der Zahlen von Getöteten und Schwerverletzten. Die Vernetzung von Fahrzeugen bietet darüber hinaus enormes Potential für eine Senkung des Ressourcenverbrauchs und die Verminderung von Emissionen.
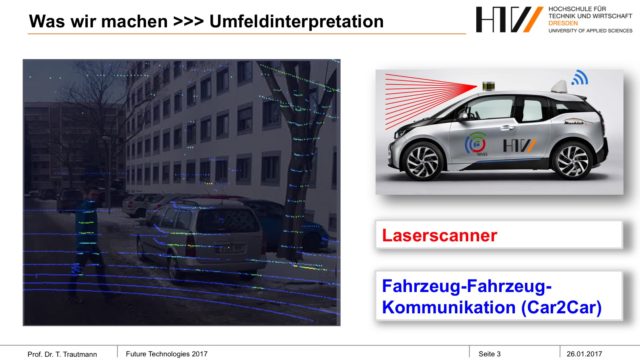
Die zu lösende primäre Aufgabe soll an einem Beispiel verdeutlicht werden. Für alle aktiven und passiven Sicherheitssysteme im Fahrzeug ist es wichtig, den genauen Zeitpunkt und den Ort eines Zusammenpralls zu erkennen. Nur so ist es möglich, den für die Insassen bestmöglichen Schutz zu bieten. Obwohl Laserscanner im Vergleich zu anderen Methoden bereits eine sehr detaillierte Objekterkennung ermöglichen, ist insbesondere eine frühzeitige Kollisionsberechnung stark fehlerbehaftet.
Durch Fahrzeug-Fahrzeug-Kommunikation (Car2Car) tauschen die Verkehrsteilnehmer wichtige Informationen in einem geographischen Gebiet aus. Das Basiskonzept der Car2Car-Kommunikation beruht auf dem Senden und Empfangen standardisierter Nachrichten über die Luftschnittstelle sowie der Interpretation der darin übertragenen Zustandsinformationen entweder zyklisch oder ereignisgesteuert. Hierzu können neben der eigenen GPS-Position auch Daten wie Fahrzeugtyp, Abmessungen, Fahrzeugmasse, Beladung und ähnliches zählen. Damit ist es einerseits möglich, die Messdaten des Laserscanners optimal an eine Box mit den tatsächlichen Fahrzeugabmessungen anzupassen und somit die Objektdetektion zu verbessern.
Andererseits erlaubt die kooperative Fahrzeugkommunikation eine Steigerung der Ortungsgenauigkeit der GPS-Position der beteiligten Fahrzeuge. Der wissenschaftliche Lösungsansatz dafür liegt in der Kopplung von Ortungsdaten GPS-basierter Systeme mit relativen Ortungsdaten der Car2Car-Kommunikationssignale.