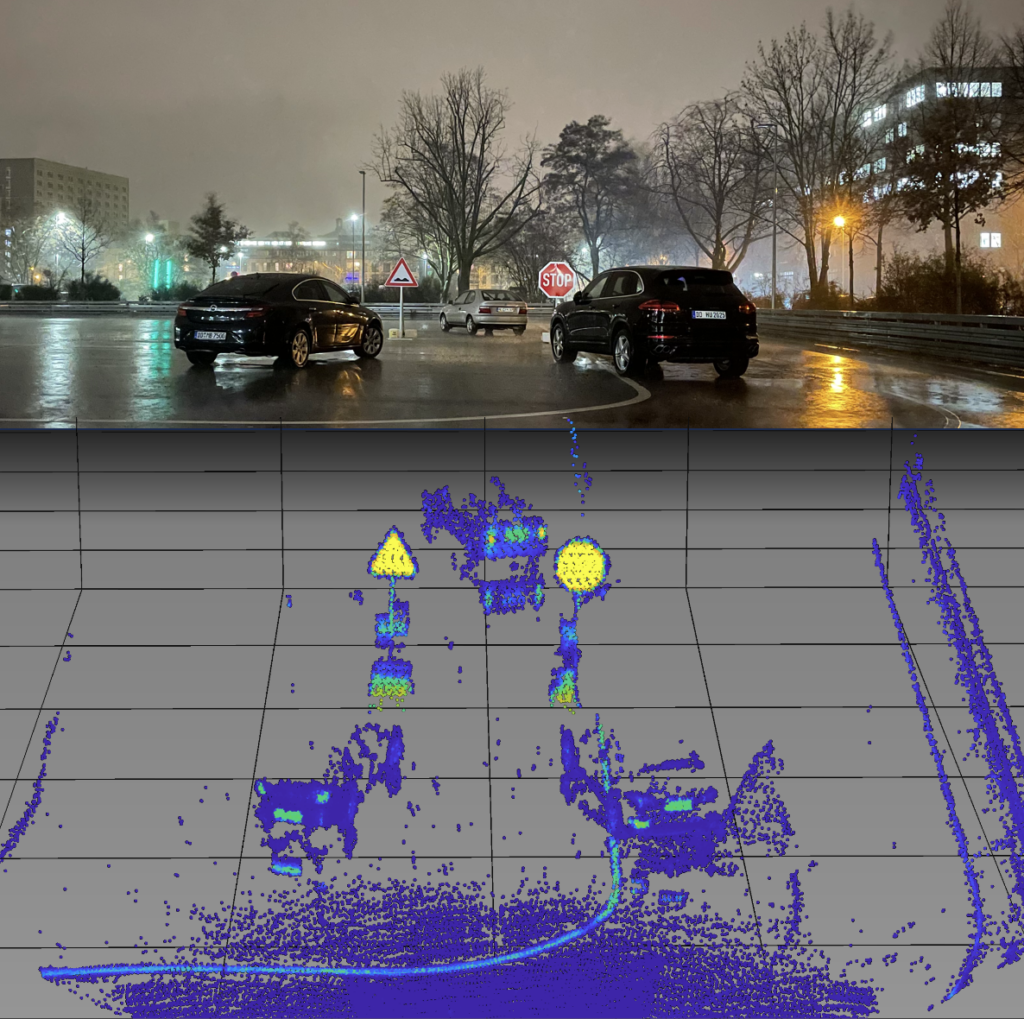
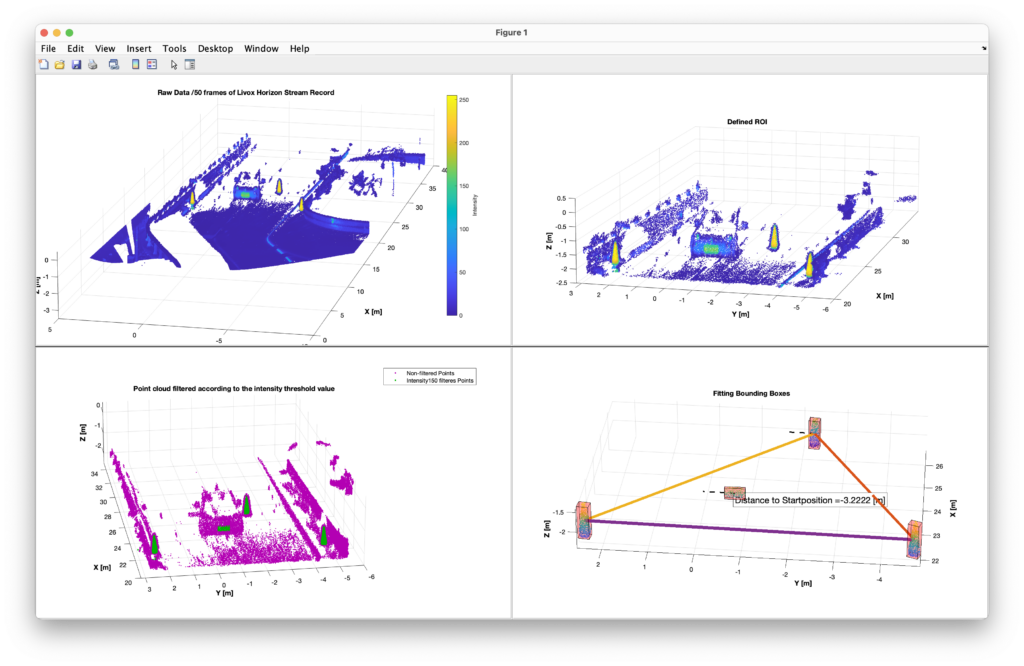
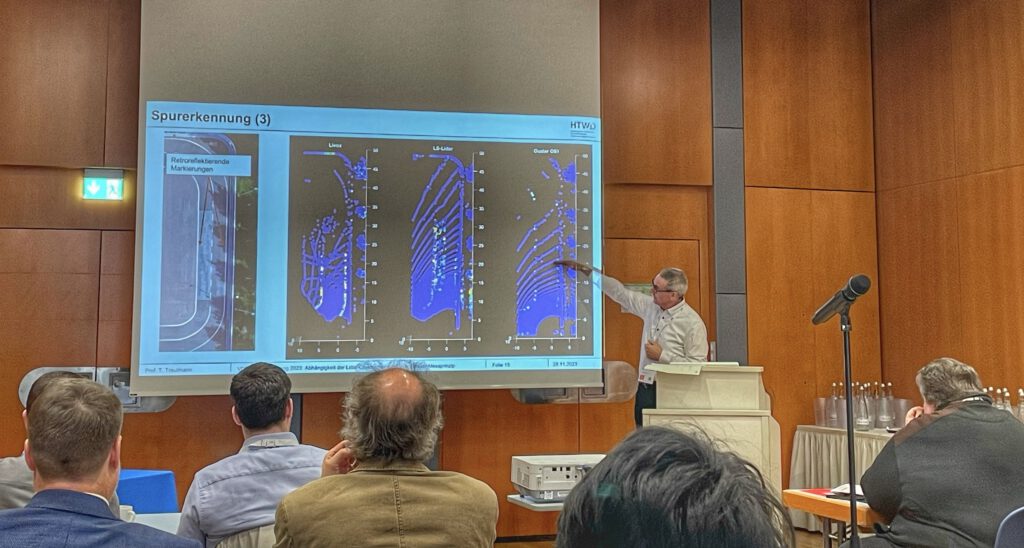
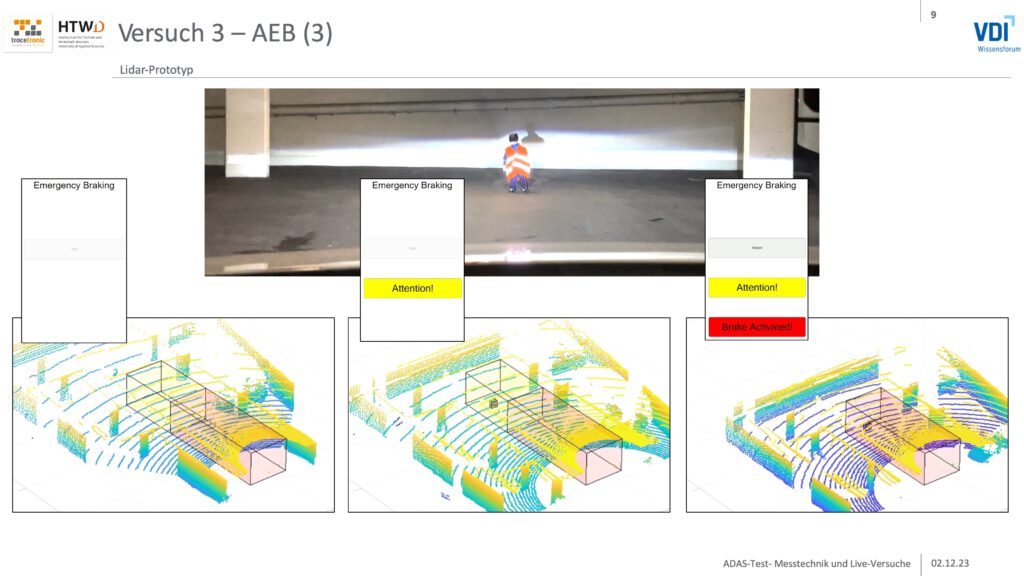
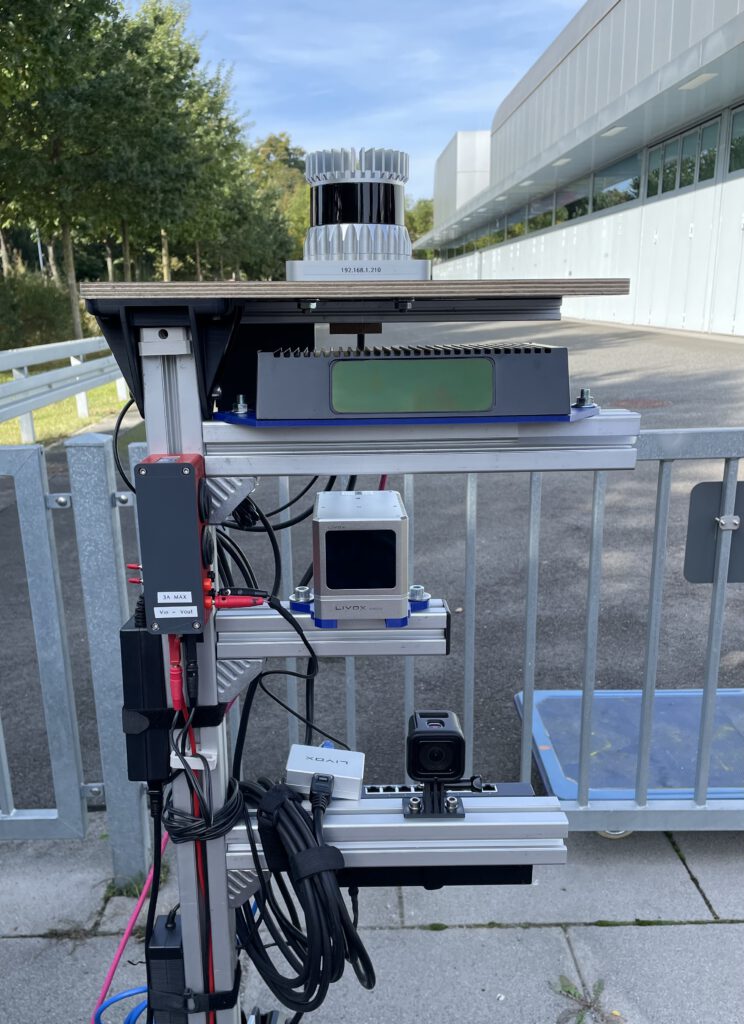
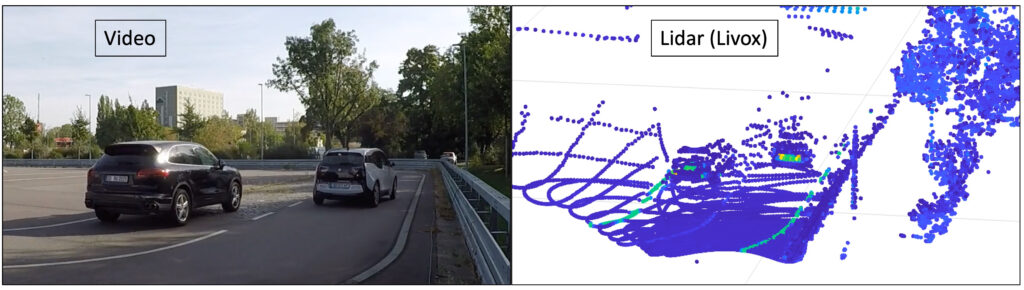
Die Pause zum Jahreswechsel wurde vom Mechlab-Team genutzt, um den Einfluß der Witterung auf die Lidar-Detektion zu ermitteln. Dazu wurden drei Lidare (Ouster, Livox und LS-Lidar) zur Erkennung von stationären Objekten mit unterschiedlichen Reflexionseigenschaften genutzt. Dabei konnten interessante Erkenntnisse bezüglich der Retro-Reflexion bei nasser Fahrbahn gewonnen werden. Die Detailauswertung wird zeigen, ob eine sichere Methodik zur Ableitung der Witterung möglich ist. Die Ergebnisse werden in nächster Zeit auf www.lab4test.de veröffentlicht.
The Mechlab team used the break at the turn of the year to determine the influence of the weather on lidar detection. For this purpose, three lidars (Ouster, Livox and LS-Lidar) were used to detect stationary objects with different reflection properties. Interesting findings regarding retro-reflection on wet roads were gained. The detailed evaluation will show whether a reliable method for deriving the weather is possible. The results will be published on www.lab4test.de soon.