Allgemein:
„Nutzfahrzeug-Platooning“ ist eine der nachhaltigsten und erfolgversprechendsten Zukunftstechnologien in der Logistikbranche. Dabei werden mehrere Lkw in einem Verband zusammengefasst und der Sicherheitsabstand zwischen den einzelnen Fahrzeugen wird reduziert.
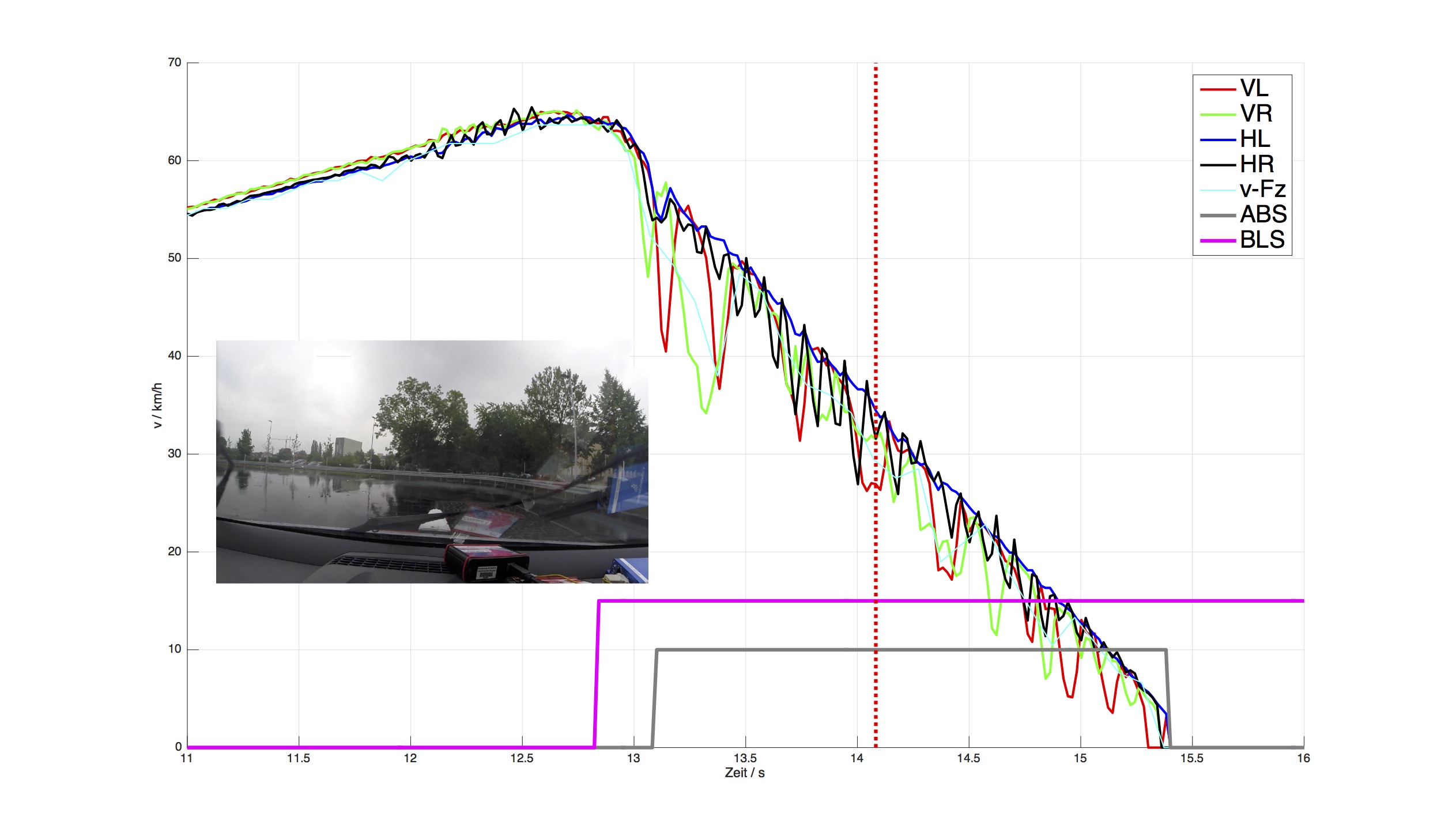
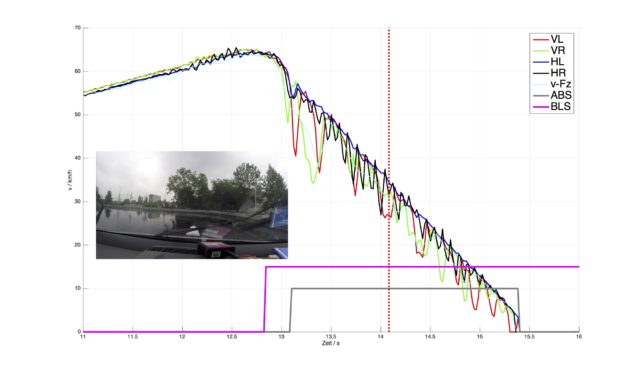
Diese Reduzierung ist nur möglich, wenn die Fahrzeuge untereinander kommunizieren und ein vom ersten Lkw eingeleitetes Bremsmanöver direkt an alle folgenden Fahrzeuge weitergeleitet wird, so dass diese ebenfalls unverzüglich ein Bremsmanöver mit der entsprechenden Verzögerung einleiten können. Der Sicherheitsabstand und die Reaktionszeit wird dadurch minimiert.
Der entscheidende Vorteil ist aber nicht der geringere Platzbedarf des „Platoon“ im Verkehr, sondern seine verbesserte Aerodynamik im Vergleich zu den einzelnen Lkw. Durch den reduzierten Luftwiderstand lassen sich bei einem Abstand von ca. 10m etwa 10% Kraftstoff für den gesamten „Platoon“ einsparen. Damit verbunden ist auch die Reduzierung der CO2 Emission.
Simulation:
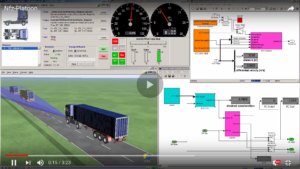
Mit „IPG-Truckmaker“ und „MATLAB-Simulink“ wird die Geradeausfahrt eines „Platoon“, bestehend aus mindestens drei Lkw simuliert. Parallel dazu erfolgt die Auslegung eines Reglers für die Längsführung des Ego-Fahrzeuges.
Die Reglerauslegung als PID erfolgte in MatLab-Simulink. Dieser ersetzt die Signale „VC Brake“ und „VC Throttle“ des IPG Modells. Die Eingangswerte (Abstand, Geschwindigkeit, Beschleunigung) für den Regler werden durch einen „long range“ Radarsensor am Ego-Fahrzeug bereitgestellt. Gleichzeitig wird eine generische Funkverbindung simuliert, die über ein zeitliches Offset die fahrdynamischen Parameter des Führungsfahrzeuges übermittelt. In Ergänzung werden über die Parameter „desired time gap“ und „desired speed“ die Zeitlücke und die Zielgeschwindigkeit vorgegeben.
Für eine Erweiterung der Simulation werden die Fahrzeugpositionen aller im „Platoon“ befindlicher Fahrzeuge ausgelesen, welche später auch in GPS Koordinaten umgerechnet werden können.
Die Ergebnisse der Arbeit sind Bestandteil theoretischer Vorbetrachtungen des Platooning Projektes. Daraus sollen Grenzwerte der Funkstrecke sowie des Sicherheitsabstandes abgeleitet werden.