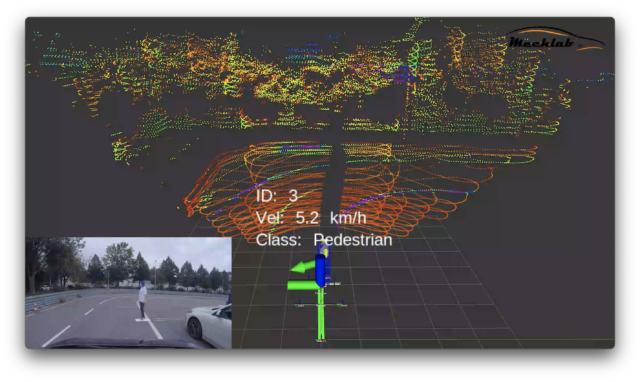
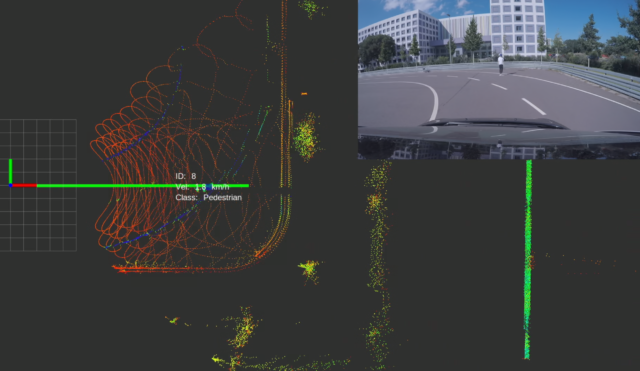
Nach mehrjähriger Entwicklungsarbeit konnte Ende 2021 die teilautomatische Messtechnik für das BMW-Prüffeld in Leipzig übergeben werden. Kernstück ist ein ROS-Netzwerk mit 10 Lidar-Sensoren und mehreren Kameras. Viele Manöver zum Test von automatisierten Fahrfunktionen können so einfach bewertet werden.
After several years of development work, the semi-automatic measurement technology for the BMW test field in Leipzig was handed over at the end of 2021. The core is a ROS network with 10 lidar sensors and several cameras. Many maneuvers of automated driving functions can be tested fast and easily evaluated.