Am 16.03.2017 hat Herr Christopher Dunkel seine Diplomarbeit zum Thema „“ erfolgreich verteidigt. Die Arbeit ist der erste Meilenstein im Projekt „Platooning“. Jetzt sind die grundlegenden Möglichkeiten der Ansteuerung des Renault-Twizy implementiert, so dass in den nächsten Schritten mit der Inbetriebnahme der Umfeld- und Kommunikationssensorik (Car2x) begonnen werden kann. Details zum Projekt finden sich hier, die Diplomarbeit hier. Herr Dunkel wird weiterhin im Labor als wissenschaftlicher Mitarbeiter tätig bleiben. Wir freuen uns auf die weitere Zusammenarbeit.
Mit unserem Projektvorschlag openHADMaps stehen wir im Finale des ersten BMVI StartUp Pitch. Am 29.3. werden wir unsere Idee im Bundesministerium für Verkehr und Digitale Infrastruktur (BMVI) präsentieren. Unter der Leitung von Herrn Dobrindt haben wir die Chance in 3 Minuten den Kerngedanken unsere Idee vorzutragen. Besucher (mit Voranmeldung) sind herzlich eingeladen. Näheres findet Ihr unter folgenden Link http://www.bmvi-startup-pitch.de/
Mit dem Thema Open Maps for Highly Automated Driving (openHADMaps) haben wir uns beim ersten BMVI StartUp Pitch beworben. Basierend auf OSM Karten, soll über ein erweiterten Layer essentielle Informationen die für das hochautomatisierte Fahren ergänzt werden.
Im Rahmen einer Kooperation zwischen CASONEX und mechlab werden neue Strategien und Konzepte zur Mensch-Maschine-Interaktion untersucht. Im ersten Schritt haben wir uns dem Thema Qualitätssicherung im Fertigungsprozessen und dem des Testens von Fahrerassistenzsystemen über ein mobiles Messsystem auseinandergesetzt.
Am 03.02.2017 hat Herr Yeyi Qiu (laborinterner Deckname „Finn“) seine Diplomarbeit zum Thema „Kamerabasierte Erkennung von Fußgängern in urbanen Verkehrsszenen“ erfolgreich verteidigt. Er ist Teilnehmer des 2+3 Austauschprogramms mit der Universität Hangzhou. Das gesamte Mechlab-Team bedankt sich für die sehr gute Zusammenarbeit und wünscht ihm alles Gute für die Zukunft. Zur Ansicht des Vortrags bitte auf das Bild klicken.
Das im Labor für Kfz-Mechatronik (MechLab) neu entwickelte Ampelmodul konnte jetzt seine volle Funktionsfähigkeit nachweisen. Durch ein WLAN Ad-hoc-Netzwerk auf Basis des Standards IEEE 802.11p werden die aktuelle Ampelphase, die Restlaufzeit und eine lokale Karteninformation an alle erreichbaren Teilnehmer gesendet. Damit sind im Fahrzeug Assistenzfunktionen wie eine energieoptimierte Annäherung realisierbar. Aktuell ist bereits eine Kreuzung in Dresden dauerhaft mit einem solchen Modul ausgestattet (Fritz-Löffler-Platz) in den kommenden Jahren wird es mehrere Korridore durch die Stadt geben. Das Video (Bitte Bild anklicken) zeigt die Annäherung des Versuchsfahrzeuges an die mobile Ampeleinheit vor dem MechLab-Gebäude.
Lichtschranken Messanlage in Betrieb genommen. Erste Testmessung im Technikum der HTW Dresden. Als Versuchsfahrzeug wurde ein Elektroroller genutzt. Die visualisierte Ausgabe der CAN Signale erfolgte im Program CANoe.
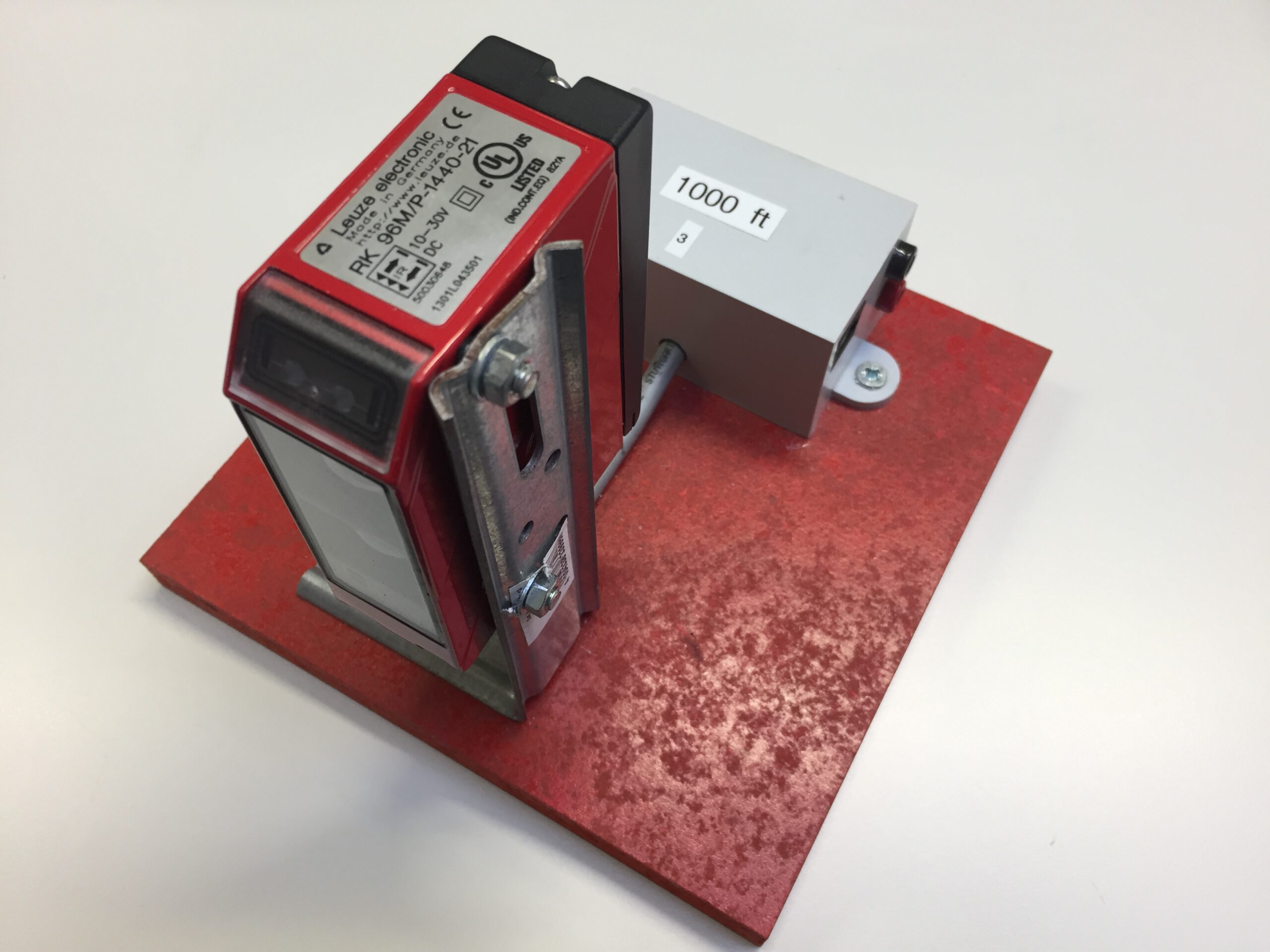
Lichtschranken Messanlage mit 12 Lichtschranken der Firma Leuze . Die Lichtschranken sind vom Typ RK 96M/P-1440-21.
Lichtschranke Leuze
In der Messbox befindet sich eine elektrische Schaltung zur Auswertung der Signale. Mit dem Mikrocontroller AT90CAN werden die Signale digitalisiert und auf den CAN Bus ausgegeben.
Messbox für Lichtschranken
Technische Details:
Die Anlage ist frei konfigurierbar von einer Lichtschranke bis zu max. 14 Lichtschranken. Die Abstände zwischen den Lichtschranken kann ebenfalls frei gewählt werden. Die Lichtschranken werden über zwei Kabel mit der Messbox verbunden. Ein zwei adriges Kabel für die Spannungsversorgung. Ein Ethernetkabel für die Signalübertragung. Die Spannungsversorgung von 24 Volt für die Lichtschranken stellt ebenfalls die Messbox zu Verfügung.
Am 05.12.2016 fand der 5. Stammtischabend der Projektinitiative „Intelligente Verkehrssysteme Sachsen (IVS)“ statt. Zu Beginn informierte Prof. Frank Köster vom DLR über die bereits seit 2009 laufenden Aktivitäten im Testfeld Niedersachsen. Danach zeigten die Mitarbeiter des Labors für Kfz-Mechatronik der HTW Dresden (MechLab) die eigenen Aktivitäten auf diesem Gebiet. Die zahlreichen Nachfragen spiegelten das große Interesse an den verschiedenen Forschungsprojekten wider.
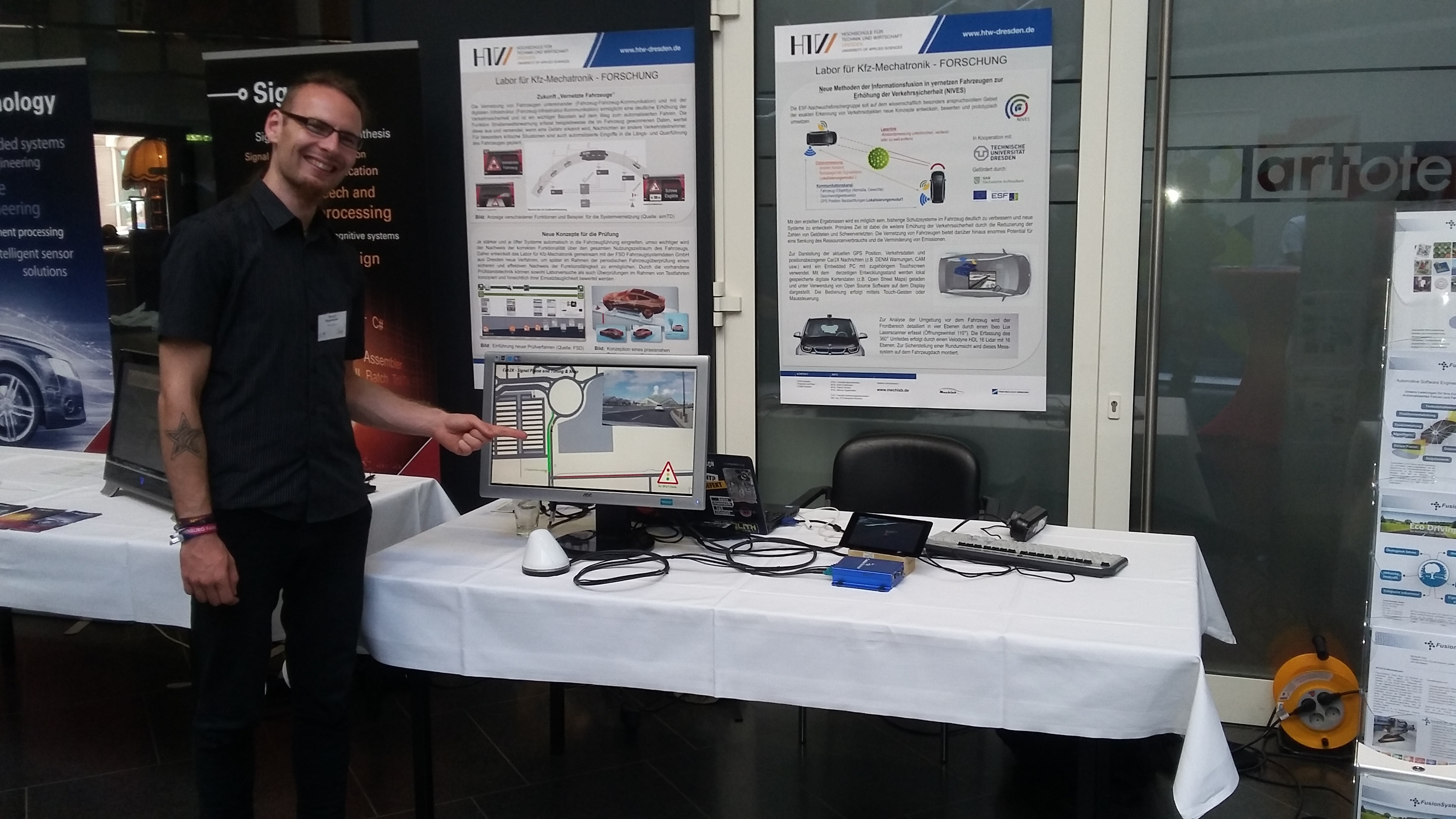
Am 15.09. trafen sich die Kompetenzträger des IVS Sachsen in Dresden. Im Rahmen der Fachtagung „Intelligente Lösungen für effiziente Mobilität“ wurden aktuelle Entwicklungen und Zukunftsprojekte zum vernetzten, hoch- bzw. vollautomatisierten Fahren vorgestellt. Das Mechlab der HTW Dresden stellte neben dem aktuellen NIVES Projekt, die kartenbasierte 3D Visualisierung der Car2X Information über ein embedded System mit Display vor. Weiterführend soll der Controller als Datenlogger und Sensorplatform verwendet werden.
Marcus Degenkolbe und sein PC bei der IVS Sachsen Fachtagung
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.