Vom 2.-4. November 2020 fanden die vom Handelsblatt organisierten Mobility Days statt. Auf Grund der Corona-Beschränkungen fand die Tagung im Online-Format statt. Das Mechlab-Team konnte neueste Ergebnisse zum Thema Prüftechnik für Notbremssysteme einbringen und dabei auch auf ein Testdilemma hinweisen. Im Gegensatz zu anderen Situationen ist die Fußgängererkennung nicht mit realen Personen durchzuführen. Damit besteht die Gefahr, dass eine KI-basierte Erkennung keine realen Situationen als Grundlage hat.
 TTLab
TTLab
Mechlab-Tagungsbeitrag
Vom 09-10.09.2020 fand die Online-Tagung „Automotive Imaging Systems (Europe)“ statt. Das Mechlab-Team war dabei mit einem Vortrag zur Nutzung von Lidar-Systemen zur Verbesserung der Fahrspurdetektion vertreten. Neben den allgemeinen Informationen zum Thema wurden Live-Messungen an retroreflektierenden Folien vorgestellt und diskutiert. Besonders der neue Scanner der Fa. Livox bietet bei stationären Messungen Vorteile, da er durch die Bewegungsmuster die gesamte Oberfläche erfassen kann und nicht nur die sonst üblichen Kreisbögen. Unter dem nachfolgenden Link ist die Präsentation zu finden.
Platooning auf dem Prüffeld in Kooperation mit der TU Dresden
Im Rahmen der Diplomarbeit von Lu Jiang (TU Dresden, Professur für Informationstechnik für Verkehrssysteme) wurde ein Algorithmus zur Realisierung von Platooning umgesetzt.
Im Fokus stand dabei die Anwendung einer modellprädiktiven Regelung. Vor dem Test auf dem Prüffeld erfolgte der Entwurf des Regelkreises simulativ. Im Anschluss wurden die Regelkreisparameter für den automatisierten BMW Tech i3 auf dem Prüffeld erprobt und angepasst. Für die Ansteuerung der Längs- und Querführung wurde der modellprädiktiven Regelung eine PID Regelung nachgelagert. Das Führungsfahrzeug, der BMW i3 der TU Dresden und das automatisierte Folgefahrzeug sind mit einem WLANp-Funkmodul ausgerüstet. Das Funkmodul im Führungsfahrzeug erhält die aktuelle Position über eine Real-Time Kinematic GNSS Einheit und übermittelt die aktuelle Position und die Beschleunigung an das Folgefahrzeug. Das Folgefahrzeug hält bei aktiviertem Platooning in Abhängigkeit der Geschwindigkeit den Abstand.
Im Training konnte das Szenario bis zu 4 m/s stabil durchgeführt werden. Das nachfolgende Video repräsentiert den aktuellen Stand der Umsetzung.
MDR-Beitrag veröffentlich
Der am 23.07.20 mit großem Testaufwand erstellte Beitrag für MDR-Wissen ist nun online. Mit einem Klick auf das Bild gelangt man zur entsprechende Seite.
Aufnahme eines Beitrags für MDR-Wissen
Im Herbst 2018 erstellte ein Team von MDR-Wissen einen Beitrag zur Zukunft der Mobilität. Dort wurden die gerade begonnenen Aktivitäten des Mechlab-Teams auf dem Prüffeld der HTW vorgestellt. Jetzt war es an der Zeit, eine Aktualisierung zu erstellen. Hierzu wurden am 23.07.20 neue Aufnahmen erstellt. Den Schwerpunkt bildete dabei die Prüfung automatisierter Fahrfunktionen mit der vom Mechlab-Team erstellten Prüftechnik. Diese ist bereits bei Fahrzeugherstellern im Einsatz. Wie in den nachfolgenden Ausschnitten zu erkennen ist, sind die gegenwärtig verfügbaren Seriensysteme nicht immer in der Lage, einen Unfall mit einem Fußgänger zu verhindern. Daher bleibt es dabei, der Fahrer muss weiterhin aufmerksam sein und darf sich nicht vom Verkehrsgeschehen abwenden. Die Systeme sind lediglich ein letzter Schutz bei einer kurzzeitigen Ablenkung oder einer Überforderung des Fahrers.
Mechlab am Campustag

Das Mechlab Team war mit Dirk und dem BMW Tech i3 auf dem Campustag vertreten. Es kamen viele Studenteninteressenten um sich über die einzelnen Fakultäten und deren Studiengänge zu informieren. Wir haben dabei die Fahrzeugtechnik vertreten. Wir denken es war eine gelungene Veranstaltung, um die HTW Dresden nach außen zu präsentieren.
Mechlab unterstützt die Produktion von Gesichtsschilden für Dresdner Kliniken
In Kooperation mit DRESDEN-concept und dem Rapid-Labor der HTW Dresden nutzen wir unsere freien 3D-Druck Kapazitäten um Teile für Gesichtsschilde herzustellen und damit bei möglichen Lieferengpässen von medizinischen Bedarfsteilen auszuhelfen. Dadurch können wir täglich bis zu 20 Bauteile zur Verfügung stellen und unseren Teil bei der Bekämpfung des SARS-CoV-2 Virus leisten.
Weitere Infos:
https://www.htw-dresden.de/news/dresden-concept-produziert-3d-gedruckte-gesichtsschilde-fuer-dresdner-kliniken-mit-dabei-das-rapid-labor-der-htw-dresden
https://www.dresden-concept.de/services/coronavirus-3d-druck.html
15 Jahre Mechlab
Am 01.04.2005 betrat ich als frisch berufener Professor die HTW Dresden. Seit dieser Zeit ist viel passiert, zahlreiche Studenten und Mitarbeiter haben im Labor mitgewirkt oder sind immer noch aktiv dabei. Vielen Dank hierfür und auf weitere gute Zusammenarbeit.
Mein Dank gilt auch allen Projektpartnern, die durch ihre Mitwirkung und die finanzielle Unterstützung die Erfolge des Labors erst möglich gemacht haben. Auch hier hoffe ich auf weitere spannende Projekte für die nächsten 15 Jahre.
Leider verhindert die Corona-Pandemie derzeit eine Feier, diese ist aber nur aufgeschoben. Tröstlich ist, dass wenigstens ein Mitarbeiter kommen durfte, auch wenn das Gespräch etwas einsilbig verläuft.

Landespolizeipräsident zu Besuch
Am 02.03.2020 besuchte Landespolizeipräsident Horst Kretzschmar die HTW Dresden. Zum Abschluss seines Besuchs informierte er sich beim Mechlab-Team auf dem Prüffeld für automatisierte Fahrfunktionen über technische Randbedingungen des automatisierten Fahrens. Dabei zeigte er sich nach der üblichen Testfahrt beeindruckt von der Leistungsfähigkeit des Teams und den Möglichkeiten, die den Studierenden in diesem Bereich geboten werden.

Mechlab@BMW
Das vom Mechlab-Team entwickelte Robotersystem wurde offiziell in einer BMW-Presseinformation zu neuen Prüftechnologien vorgestellt. Mit diesem System ist eine effektive und genaue Prüfung der neuen Funktion „Komfort-Zugang“ möglich. Das nachfolgende Video (Link zur Originalseite) zeigt das System im Einsatz.
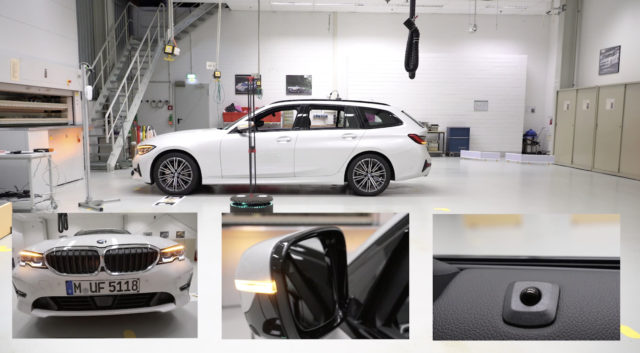
Der zugehörige Artikel ist hier verfügbar: