Die Idee
Eines der langfristigen Ziele der Forschungsgruppe NIVES ist die Evaluation und Fusionierung von Sensorik für autonome Fahrfunktionen. Dafür besitzt die Hochschule bis dato zwei Fahrzeuge, einen BMW i3 und einen Renault Twizy. Beide Fahrzeuge sind bereits zum Teil mit Sensoren und Aktuatoren ausgestattet worden um die grundlegenden autonomen Fahrfunktionen (Beschleunigen, Bremsen, Lenken) ohne menschliches Eingriff durchführen zu können. Durch die fortschreitende Entwicklung von Algorithmen für autonome Fahrfunktionen und dem noch nicht abgeschlossenen Umbau der verfügbaren Fahrzeuge entstand die Idee ein schnell einsatzbereites kleines Modellfahrzeug zu nutzen um sowohl die Algorithmen als auch das Gesamtsystem in einer natürlichen Umgebung, auf dem hauseigenen Testfeld der HTW Dresden, zu testen.
Die Vorteile eines Modellfahrzeugs sind:
- robust gebaut (eventuelle Fehler in den Algorithmen und resultierende Crashs sind bei einem RC-Auto harmlos)
- schnell einsatzbereit, tragbar
- kostengünstiger Umbau (meiste Sensorik durch andere Projekte bereits vorhanden)
- skalierbar (Algorithmen die auf das RC-Modell sinnvoll skaliert sind funktionieren auch im „echten“, großen Fahrzeug)
- benötigt wenig Platz (Testfahrten auf Testfeld nicht unbedingt nötig, Testfahrten im Gebäude leicht möglich)
Die Basis
Als Basis dient ein 1:5 RC-Modell (Remote Control, Ferngesteuert), welches vor einigen Jahren für Studentenpraktika und Lehre angeschafft wurde. Es war bereits mit einem kräftigen Motor, einem Motortreiber, Servomotor an der Lenkachse, sowie vier weiteren Servomotoren zum Abbremsen jedes einzelnen Rades und Drehzahlsensoren ausgestattet. Schnell zeigte sich jedoch, dass der verbaute Motor für die geplanten autonomen Fahrsituationen, wie zum Beispiel Einparken und sanftes Anfahren, ungeeignet war. Vielmehr war das Modell auf Geschwindigkeiten von ca. 60km/h im Rahmen von dynamischen Fahrversuchen (ABS, ESP) ausgelegt, was zum Entschluss führte neben der vollständigen Überarbeitung der Elektronik und dem Einbau eines Computers auch den Antriebsstrang zu verändern.
Basis-Hardware:
- 1:5 Modellfahrzeug
- Heckgetrieben
- Servomotor an Lenkachse
- Hydraulische Bremsen für jedes Rad
- Drehzahlsensoren für jedes Rad
Auszumusternde Basis-Hardware:
- Brushless-Motor mit Brushless-Motortreiber
- NiMH Akkus 12v, 4000mAh
- PCB zur Ansteuerung des Systems mit MatLab
Die ungeeignete Hardware sollte im folgenden Umbau im Rahmen der „Modernisierung“ zum autonomen Fahrzeug weichen.

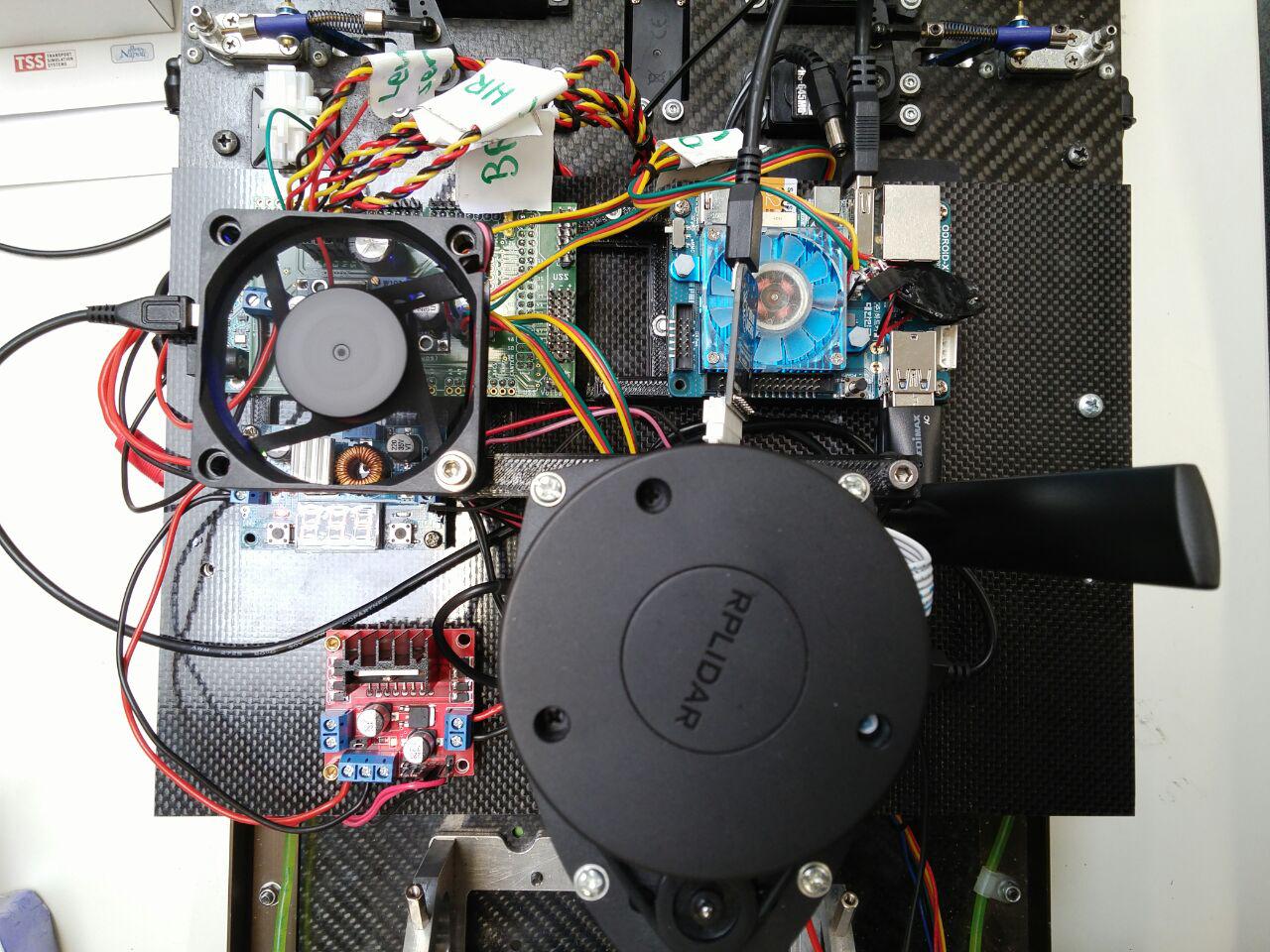
Elektronik
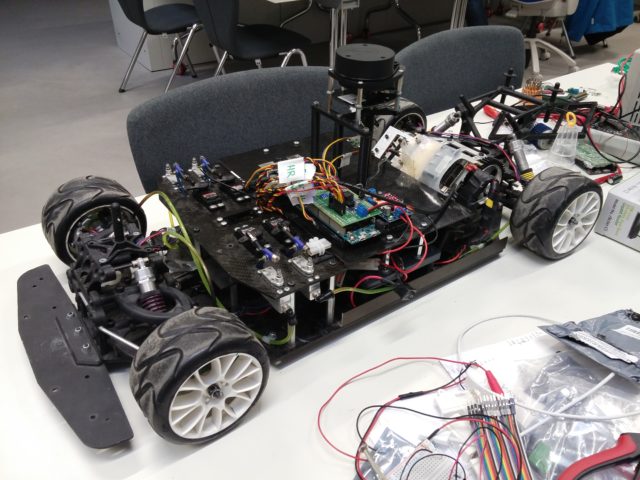
Als leistungsstarker Kleinstcomputer wurde ein Odroid XU4 verbaut. Er zeichnet sich gegenüber einem Raspberry Pi 3 durch doppelt so viel RAM und einer wesentlich stärkeren CPU aus. Der Computer dient zur Berechnung der teils komplexen Fahrmanöver und erlaubt die Kommunikation mit anderen Computern in einem verfügbaren WLAN-Netzwerk.
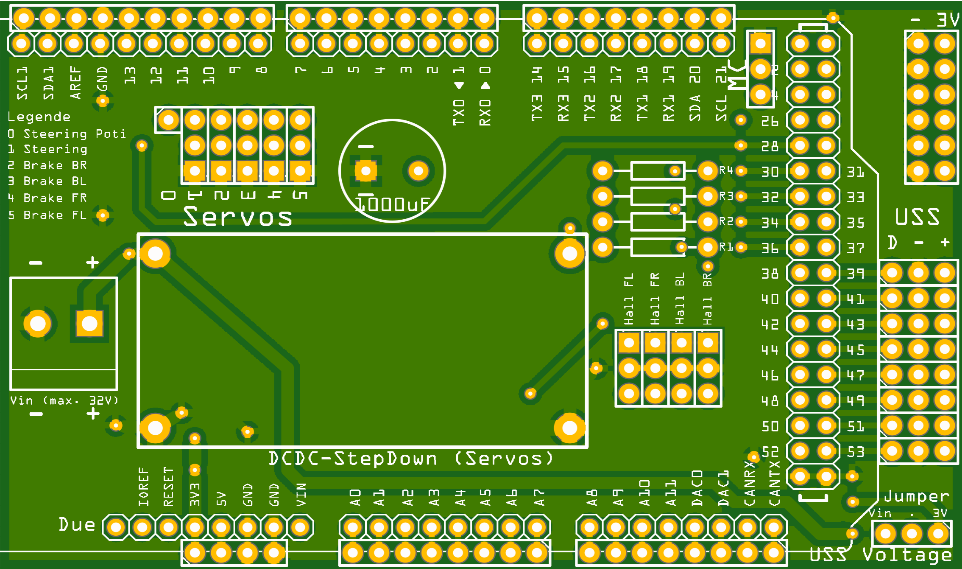
Die Ansteuerung der Motoren und Auslesen der Sensoren erfolgt mithilfe eines Arduino Due, welcher per USB-Seriell-Schnittstelle mit dem Odroid kommuniziert. Für ein einheitliches und „aufgeräumtes“ Kabelmanagement wurde für den Arduino Due eine Aufsteckplatine entworfen, welche alle Motoren und Sensorsysteme auf einer Platine zentral zusammenführt. Darüber hinaus ist die Aufsteckplatine mit bis zu acht Ultraschallsensoren erweiterbar.
Umbau
Im folgenden wird der Umbau in mehreren Stufen beschrieben.
Umbauten Stufe 1
- Schaffung einer neuen Ebene zur Montage der Elektronik (Carbonplatte) mit Montagesäulen aus dem 3D-Drucker
- Nutzung der großen Kammer unter der Carbonplatte zur Anbringung der neuen Akkus und Kabelmanagement
- Montage eines RPLidar 360° Laserscanners mithilfe 3D-gedruckter Bauteile
- Planung und Bestellung eines PCB als Aufsteckplatine für den Arduino Due
- Montageplatte für die Elektronik erstellt und 3D-gedruckt
Umbauten Stufe 2
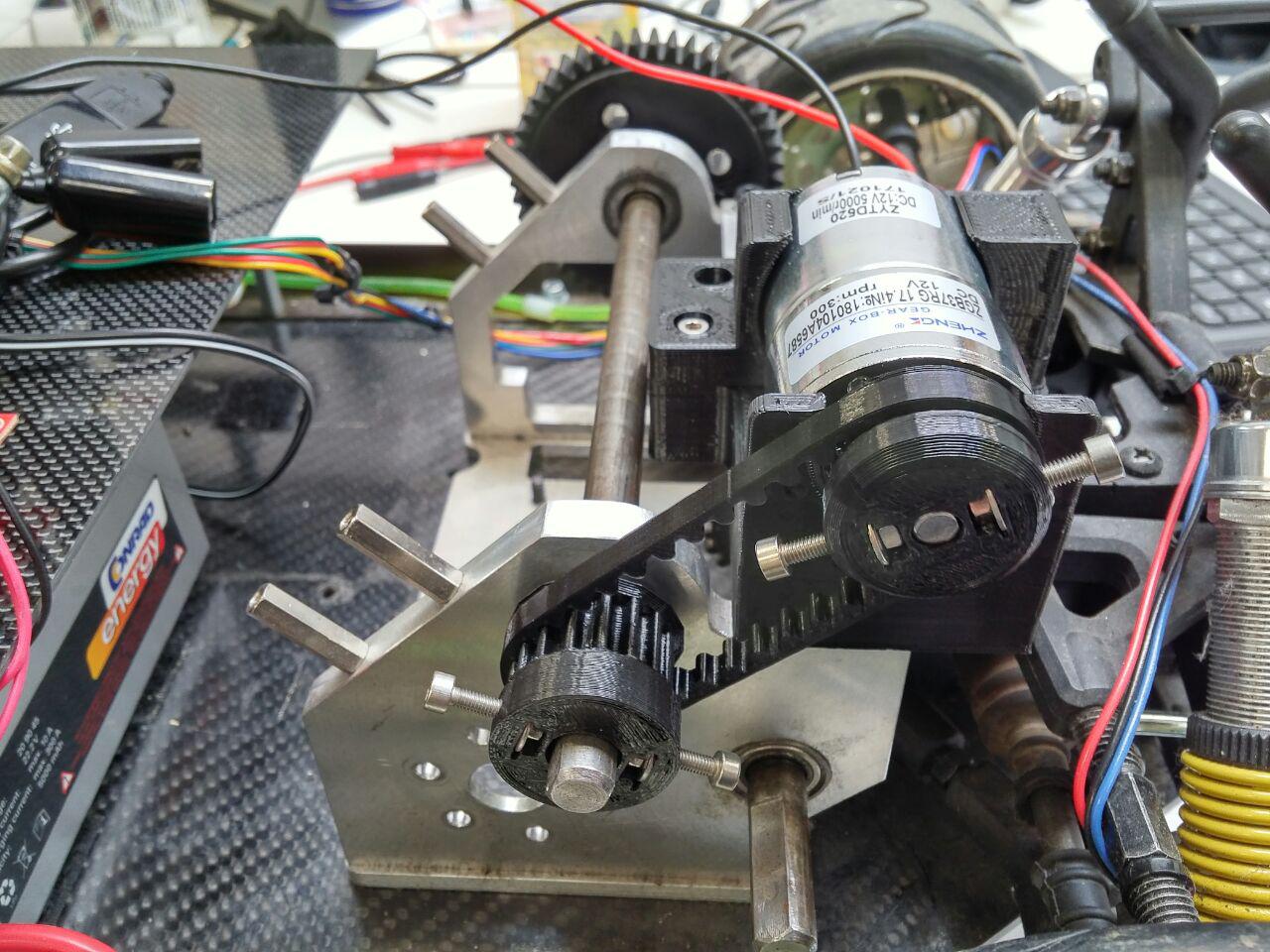
- Ersetzen des vorhandenen Brushless-Motor mit geeignetem DC-Getriebemotor (erlaubt langsame Bewegung)
- 3D-Druck von Zahnriemenrädern (PETG) und Zahnriemen (TPU) mit dem Zahnprofil HTD, sowie einer Motorhalterung
- Unterbringung des DC-Schrittmotortreibers
- Lüfter zur Kühlung der Spannungswandler
- Einbau eines leistungsstarken LiPo-Akkus (6s mit 5000mAh), entfernen der wesentlich schwereren NiMH Akkus
- Anpassung der Modellfahrzeugkarosserie auf die verbaute Hardware (Ausschnitte für Laserscanner)


Der Artikel wird zukünftig fortlaufend aktualisiert. Es folgt in Kürze der Bericht zur Umbaustufe 3.