Das diesjährige Team für den LNDW-Beitrag 2021 arbeitet mit Hochdruck an der Umsetzung. Es wird ein Testsystem für die Einparksensorik von PKW vorgestellt. Ein typisches Zielobjekt wird mittels Roboter an definierte Positionen gefahren, im Fahrzeug erfolgt über eine Kamera die Aufnahme der Anzeige. Über einen (noch zu entwickelnden Algorithmus) erfolgt dann die Bewertung der Systemleistung. Bei der LNDW 2021 wird das Gesamtsystem vorgestellt und es werden typische Bewertungssituationen mit dem Roboter angesteuert.
Zur Verbesserung der Zusammenarbeit und dem effektiven Austausch von Informationen fand am 29.06.2021 ein Vortragsnachmittag der aktuellen Mechlab-Diplomanden statt. Die Präsentationen sind über einen Klick auf die Titel abrufbar. Zur Kontaktaufnahme nutzen sie bitte eine E-Mail. Zur Vermeidung von SPAM-Zusendungen müssen sie diese selbst erstellen aus Vorname.Nachname@htw-dresden.de.
Im Oktober 2018 erstellte MDR-Wissen einen Beitrag über die zukünftige Mobilität. Hieran war auch das Mechlab-Team mit Ausführungen zu automatisierten Fahrfunktionen beteiligt (Link zum Beitrag). In diesem Jahr drehte die Redaktion eine Fortsetzung unter besonderer Berücksichtigung der Corona-Pandemie. Dieser Beitrag, in dem auch bereits bekannte Untersuchungen des Mechlab-Teams integriert wurden, ist heute in der Mediathek veröffentlicht worden. Der Sendetermin im Fernsehen ist der 25.04.21 um 22:20 Uhr. Durch Anklicken des Bildes gelangt man zum Mediathek-Beitrag.
Ein schon länger zurückliegende Idee für eine Fahrerunterstützung auf Basis einer iPhone-APP wurde jetzt in Kooperation mit der Firma Casonex aus Dresden der sächsischen Öffentlichkeit vorgestellt. Die APP mit dem Namen CARefulDrive warnt vor Unfallschwerpunkten und trägt somit zur Erhöhung der Verkehrssicherheit bei. Daneben kann der Fahrer / die Fahrerin eigene Markierungen für persönlich wichtige Punkte setzen. ier sind weiterführende Informationen:
In einem heute bei heise.de erschienenen Artikel wird auf die eklatanten Lücken über die Funktionsweise von aktuellen Fahrerassistenzsystemen eingegangen.
Das Mechlab-Team ist schon seit vielen Jahren auf diesem Gebiet tätig und versucht mit Schulungen, die Grundlagen und Grenzen sensorbasierter Umfelderkennung bekannt zu machen.
Im Rahmen von Abschlussarbeiten erfolgt der systematische Ausbau des Prüffeldes zur einfachen Evaluation vorhandener Seriensysteme. Die angekündigte gesetzliche Vorgabe ist dabei nur ein Mindeststandard, der sich nur auf einfache Situationen bezieht. Damit sind auch nach diesem Datum lediglich Fahrzeuge mit Assistenzfunktion unterwegs, der Schritt zur Hoch- und Vollautomatisierung ist damit nicht vollzogen.
Etwas erstaunt war ich gestern schon, als ich beim Anschauen der heute-show eine mir bestens bekannte Szene aus einem Fußgängertest wiedererkannt habe. Hier ist der relevante Ausschnitt:
Mit dem Ziel zukünftige forsttechnische Maschinen zu automatisieren, soll der Baumbestand von Rückegassen über einen Lidar erkannt und als Referenz zur Positionierung verwendet werden. Im Rahmen einer Bachelorarbeit wurden drei Gassen im Tharandter Wald exemplarisch ausgewählt und mit einen Laserscanner (Ouster OS1) vermessen. Zur Bewertung der Messungen wurde der Baumbestand entlang der Gasse über ein Tachymeter vermessen.
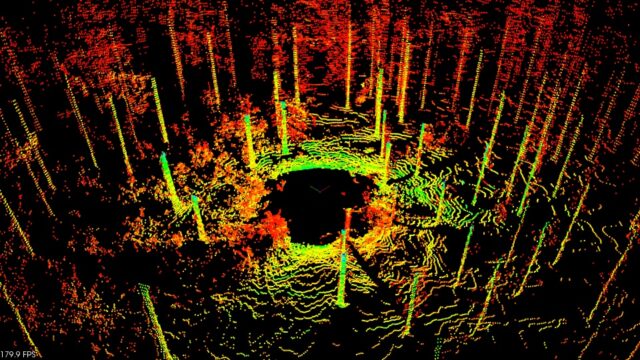
Erfassung der Rückegasse über den Ouster OS1 Lidar sowie Erfassung der Position über ein Leica Rover System
Punkdaten des Ouster OS1
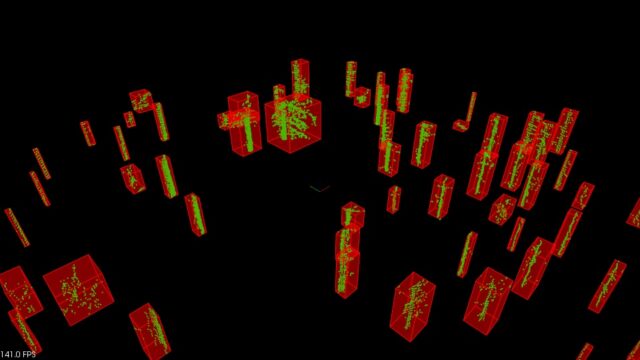
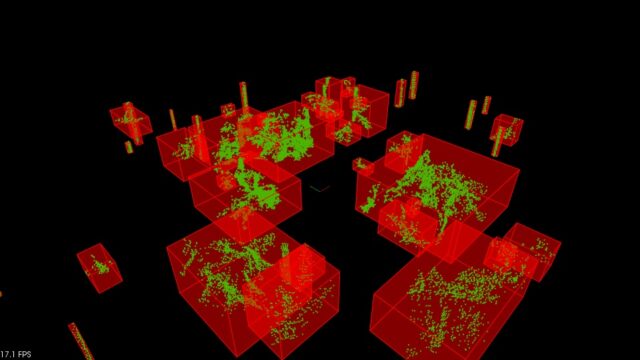
Die Punktdaten des Lidar wurden über eine Cropbox und anschließender Filterung (Voxel, Statistical-Outlier-Removal) reduziert. Über einen RANSAC wurde der Untergrund entfernt. Das anschließende Clustern erfolgte über einen euklidischen Ansatz. Als Ergebnis ist der Baumbestand als Bounding Box dargestellt.
Segmentierte Punktwolke und Darstellung des erkannten Baumbestandes als Bounding Box
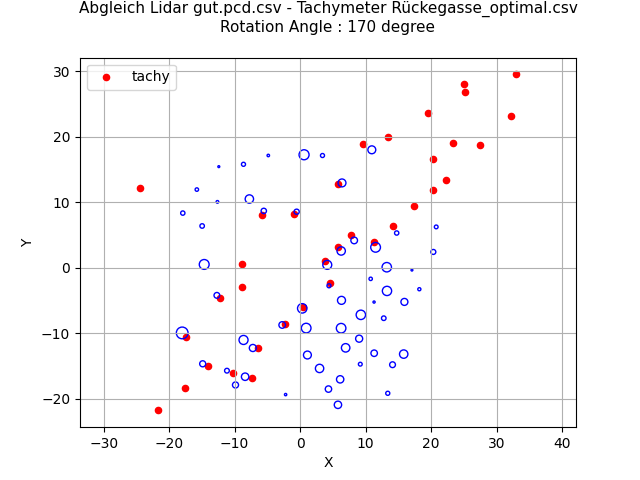
Final können die Objekte des Lidar mit den Daten des Tachymeter verglichen und bewertet werden.
Darstellung der Lidar Objekte und der georeferenzierten Daten des Tachymeter
Der Baumbestand in lichten Rückegassen wird sehr gut über das Verfahren erkannt. Eine Positionierung und Navigation von automatisierten Forstfahrzeugen wäre unter diesen Bedingungen und mit der Verwendung eines Lidar möglich. Weniger erfolgreich ist dieser Ansatz bei einem dichten Baumbestand. An dieser Stelle versagen die einfachen Methoden der Punktdatensegmentierung. Hier sind neue Ansätze und ergänzende Technologien gefragt.
Objekterkennung in einem dichten Baumbestand. Durch die Belaubung können die Baumstämme nicht erkannt werden. Die Genauigkeit zur Positionierung eines automatisierten Forstfahrzeuges ist unter diesen Bedingungen nicht gegeben.
Vom 2.-4. November 2020 fanden die vom Handelsblatt organisierten Mobility Days statt. Auf Grund der Corona-Beschränkungen fand die Tagung im Online-Format statt. Das Mechlab-Team konnte neueste Ergebnisse zum Thema Prüftechnik für Notbremssysteme einbringen und dabei auch auf ein Testdilemma hinweisen. Im Gegensatz zu anderen Situationen ist die Fußgängererkennung nicht mit realen Personen durchzuführen. Damit besteht die Gefahr, dass eine KI-basierte Erkennung keine realen Situationen als Grundlage hat.
Vom 09-10.09.2020 fand die Online-Tagung „Automotive Imaging Systems (Europe)“ statt. Das Mechlab-Team war dabei mit einem Vortrag zur Nutzung von Lidar-Systemen zur Verbesserung der Fahrspurdetektion vertreten. Neben den allgemeinen Informationen zum Thema wurden Live-Messungen an retroreflektierenden Folien vorgestellt und diskutiert. Besonders der neue Scanner der Fa. Livox bietet bei stationären Messungen Vorteile, da er durch die Bewegungsmuster die gesamte Oberfläche erfassen kann und nicht nur die sonst üblichen Kreisbögen. Unter dem nachfolgenden Link ist die Präsentation zu finden.
Im Rahmen der Diplomarbeit von Lu Jiang (TU Dresden, Professur für Informationstechnik für Verkehrssysteme) wurde ein Algorithmus zur Realisierung von Platooning umgesetzt.
Im Fokus stand dabei die Anwendung einer modellprädiktiven Regelung. Vor dem Test auf dem Prüffeld erfolgte der Entwurf des Regelkreises simulativ. Im Anschluss wurden die Regelkreisparameter für den automatisierten BMW Tech i3 auf dem Prüffeld erprobt und angepasst. Für die Ansteuerung der Längs- und Querführung wurde der modellprädiktiven Regelung eine PID Regelung nachgelagert. Das Führungsfahrzeug, der BMW i3 der TU Dresden und das automatisierte Folgefahrzeug sind mit einem WLANp-Funkmodul ausgerüstet. Das Funkmodul im Führungsfahrzeug erhält die aktuelle Position über eine Real-Time Kinematic GNSS Einheit und übermittelt die aktuelle Position und die Beschleunigung an das Folgefahrzeug. Das Folgefahrzeug hält bei aktiviertem Platooning in Abhängigkeit der Geschwindigkeit den Abstand.
Im Training konnte das Szenario bis zu 4 m/s stabil durchgeführt werden. Das nachfolgende Video repräsentiert den aktuellen Stand der Umsetzung.
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.