
Im Rahmen einer Kooperation zwischen CASONEX und mechlab werden neue Strategien und Konzepte zur Mensch-Maschine-Interaktion untersucht. Im ersten Schritt haben wir uns dem Thema Qualitätssicherung im Fertigungsprozessen und dem des Testens von Fahrerassistenzsystemen über ein mobiles Messsystem auseinandergesetzt.

Diplomarbeit erfolgreich verteidigt

Am 03.02.2017 hat Herr Yeyi Qiu (laborinterner Deckname „Finn“) seine Diplomarbeit zum Thema „Kamerabasierte Erkennung von Fußgängern in urbanen Verkehrsszenen“ erfolgreich verteidigt. Er ist Teilnehmer des 2+3 Austauschprogramms mit der Universität Hangzhou. Das gesamte Mechlab-Team bedankt sich für die sehr gute Zusammenarbeit und wünscht ihm alles Gute für die Zukunft. Zur Ansicht des Vortrags bitte auf das Bild klicken.

Mechlab @ Future Technologies
Das Labor für Kfz-Mechatronik der HTW Dresden nimmt an der Veranstaltung „Future Technologies / Science Match“ am 26.01.2017 teil. Insgesamt 100 Spitzen-Forscherinnen und Forscher aus den Technikwissenschaften stellen in je drei Minuten ihre neuesten Ergebnisse vor. Die drei Mechlab-Folien sind hier zu sehen:

Unser Dank gilt den beiden Studierenden Frau O. und Herrn Mario Herrera für die Unterstützung der Präsentation. Frau O. ist Studentin im 5. Semester Fahrzeugtechnik und freut sich schon auf die Veranstaltung Fahrzeug-Kommunikationssysteme bei Prof. Trautmann im kommenden Semester. Dort wird sie sich intensiv mit vernetzten und automatisierten Fahrzeugen auseinandersetzen (müssen…).
Herr Herrera ist Student im 7. Semester Fahrzeugtechnik und arbeitet bereits seit 2 Jahren im Mechlab-Team. Seine derzeitige Aufgabe ist die Ausstattung eines Renault-Twizy mit zusätzlicher Bremsaktorik zur Realisierung autonomer Fahrfunktionen wie Valet-Parking und Platooning.
Ampelassistenz erfolgreich getestet

Das im Labor für Kfz-Mechatronik (MechLab) neu entwickelte Ampelmodul konnte jetzt seine volle Funktionsfähigkeit nachweisen. Durch ein WLAN Ad-hoc-Netzwerk auf Basis des Standards IEEE 802.11p werden die aktuelle Ampelphase, die Restlaufzeit und eine lokale Karteninformation an alle erreichbaren Teilnehmer gesendet. Damit sind im Fahrzeug Assistenzfunktionen wie eine energieoptimierte Annäherung realisierbar. Aktuell ist bereits eine Kreuzung in Dresden dauerhaft mit einem solchen Modul ausgestattet (Fritz-Löffler-Platz) in den kommenden Jahren wird es mehrere Korridore durch die Stadt geben. Das Video (Bitte Bild anklicken) zeigt die Annäherung des Versuchsfahrzeuges an die mobile Ampeleinheit vor dem MechLab-Gebäude.

Lichtschranken Messanlage mit CAN Anschluss in Betrieb genommen
Lichtschranken Messanlage in Betrieb genommen. Erste Testmessung im Technikum der HTW Dresden. Als Versuchsfahrzeug wurde ein Elektroroller genutzt. Die visualisierte Ausgabe der CAN Signale erfolgte im Program CANoe.
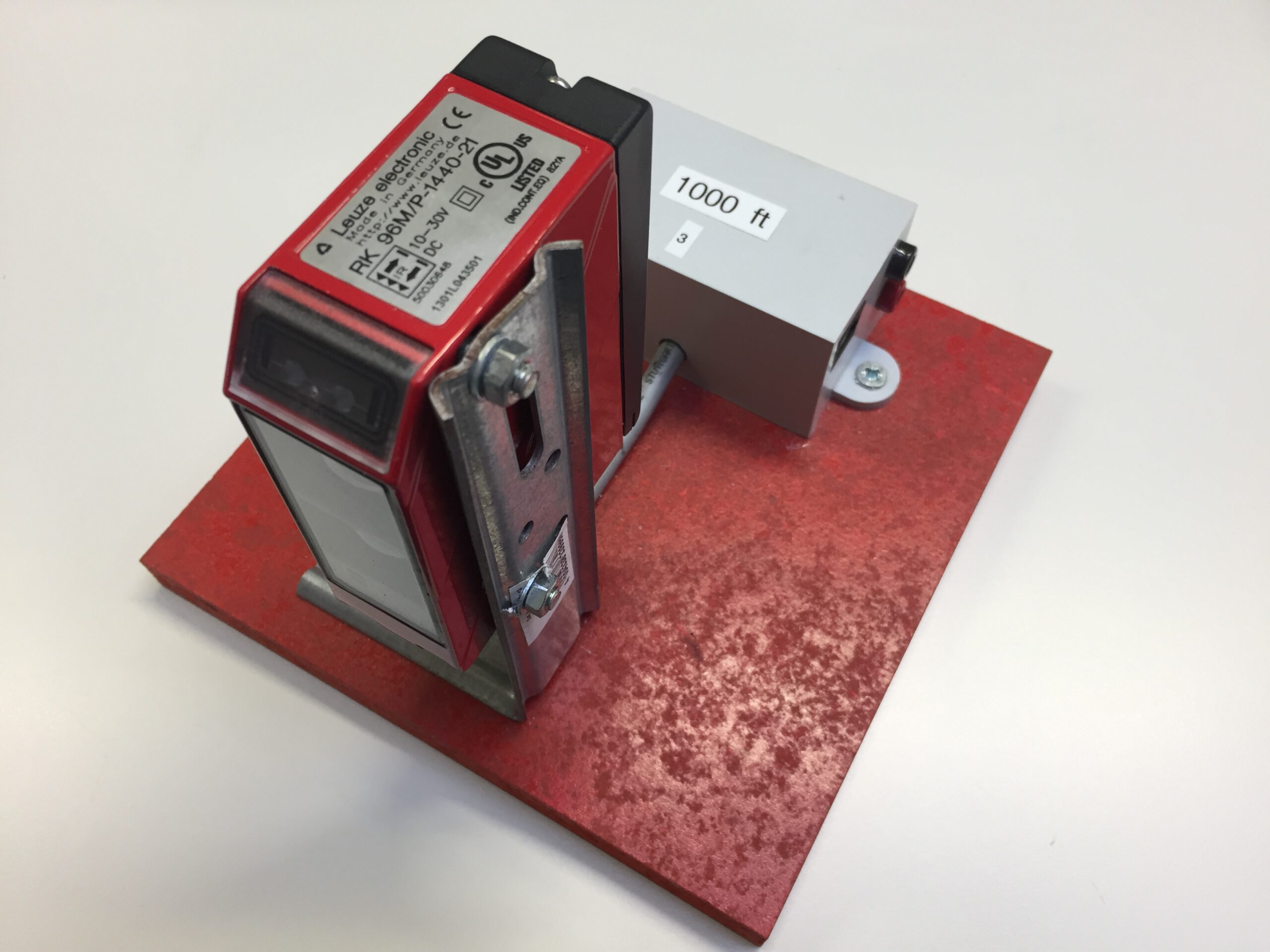
Lichtschranken Messanlage mit 12 Lichtschranken der Firma Leuze . Die Lichtschranken sind vom Typ RK 96M/P-1440-21.
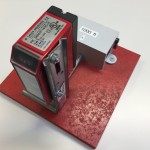
In der Messbox befindet sich eine elektrische Schaltung zur Auswertung der Signale. Mit dem Mikrocontroller AT90CAN werden die Signale digitalisiert und auf den CAN Bus ausgegeben.

Technische Details:
Die Anlage ist frei konfigurierbar von einer Lichtschranke bis zu max. 14 Lichtschranken. Die Abstände zwischen den Lichtschranken kann ebenfalls frei gewählt werden. Die Lichtschranken werden über zwei Kabel mit der Messbox verbunden. Ein zwei adriges Kabel für die Spannungsversorgung. Ein Ethernetkabel für die Signalübertragung. Die Spannungsversorgung von 24 Volt für die Lichtschranken stellt ebenfalls die Messbox zu Verfügung.
5. IVS-Stammtisch an der HTW Dresden

Am 05.12.2016 fand der 5. Stammtischabend der Projektinitiative „Intelligente Verkehrssysteme Sachsen (IVS)“ statt. Zu Beginn informierte Prof. Frank Köster vom DLR über die bereits seit 2009 laufenden Aktivitäten im Testfeld Niedersachsen. Danach zeigten die Mitarbeiter des Labors für Kfz-Mechatronik der HTW Dresden (MechLab) die eigenen Aktivitäten auf diesem Gebiet. Die zahlreichen Nachfragen spiegelten das große Interesse an den verschiedenen Forschungsprojekten wider.






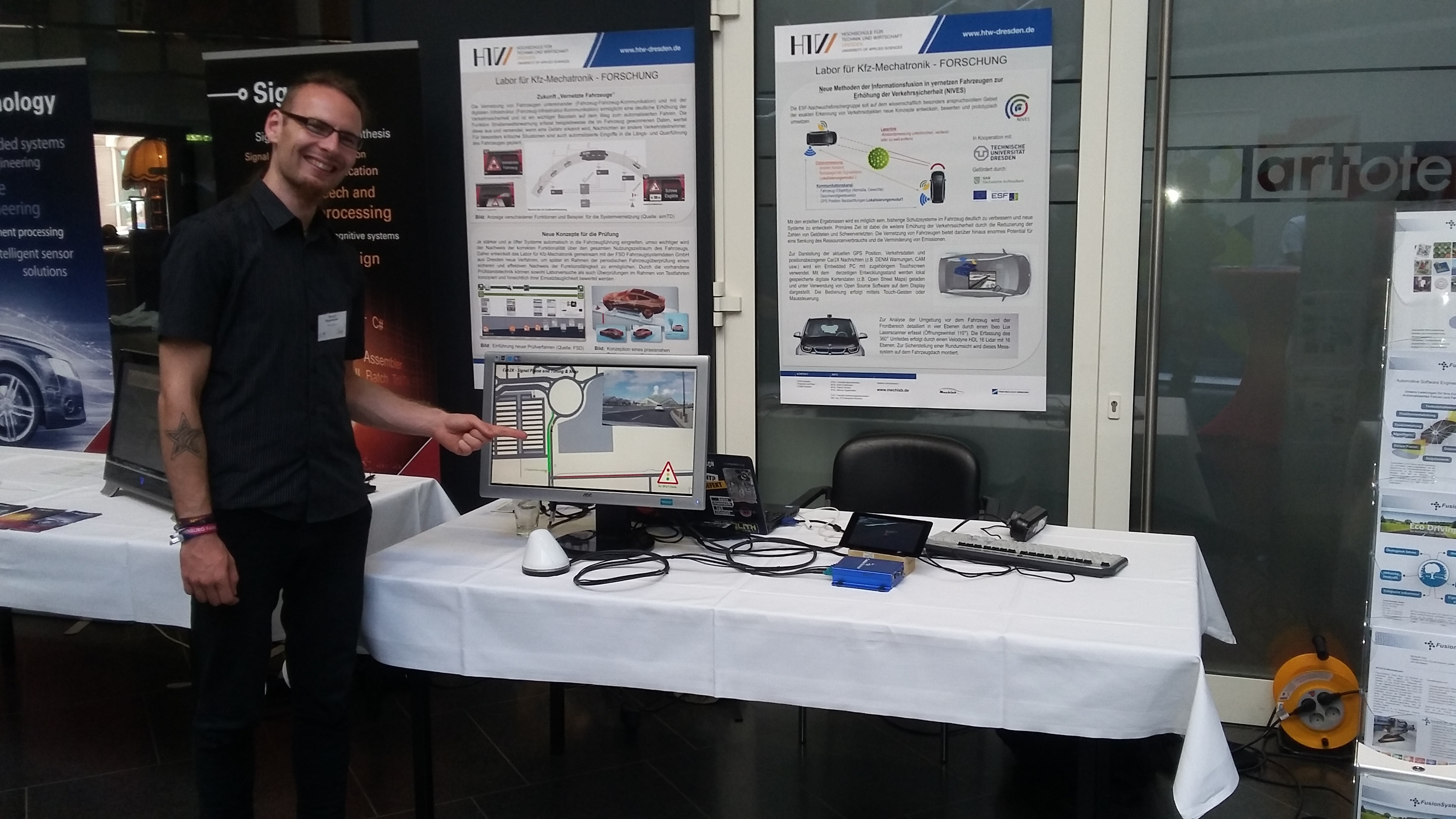
Mechlab bei der IVS Sachsen Fachtagung

Am 15.09. trafen sich die Kompetenzträger des IVS Sachsen in Dresden. Im Rahmen der Fachtagung „Intelligente Lösungen für effiziente Mobilität“ wurden aktuelle Entwicklungen und Zukunftsprojekte zum vernetzten, hoch- bzw. vollautomatisierten Fahren vorgestellt. Das Mechlab der HTW Dresden stellte neben dem aktuellen NIVES Projekt, die kartenbasierte 3D Visualisierung der Car2X Information über ein embedded System mit Display vor. Weiterführend soll der Controller als Datenlogger und Sensorplatform verwendet werden.
Neues Display in Betrieb genommen

Für das Twizy-Projekt wurde jetzt der erste Stand des eigenen Displays in Betrieb genommen. Auf Basis eines Rasberry Pi erfolgt die Anzeige ausgewählter CAN-Daten mit verschiedenen Grafiken. Diese sind für Projekte zur Fahrerinteraktion beliebig anpassbar. Für die finale Ausbaustufe sind mehrere dieser Displays geplant. Damit können bei automatisierter Fahrt Nebentätigkeiten wie Lesen von Nachrichten sicher ausgeführt werden.
Zum Start des Videos bitte auf das Bild klicken.

Kurzbeschreibung der Forschungsinhalte
Die Nachwuchsforschergruppe soll auf dem wissenschaftlich besonders anspruchsvollem Gebiet der sehr genauen Erkennung von Verkehrsobjekten neue Konzepte entwickeln, bewerten und prototypisch umsetzen. Mit den erzielten Ergebnissen wird es möglich sein, bisherige Schutzsysteme im Fahrzeug deutlich zu verbessern und neue Systeme zu entwickeln. Primäres Ziel ist dabei die weitere Erhöhung der Verkehrssicherheit durch die Reduzierung der Zahlen von Getöteten und Schwerverletzten. Die Vernetzung von Fahrzeugen bietet darüber hinaus enormes Potential für eine Senkung des Ressourcenverbrauchs und die Verminderung von Emissionen.
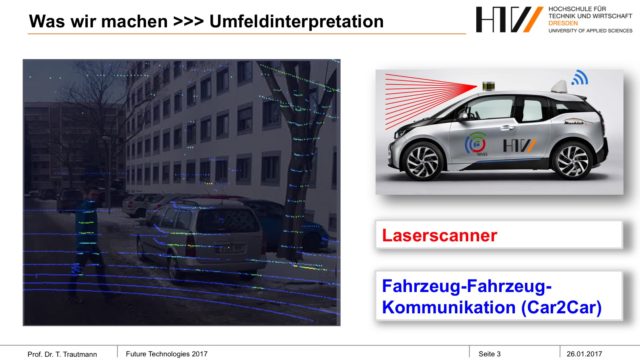
Die zu lösende primäre Aufgabe soll an einem Beispiel verdeutlicht werden. Für alle aktiven und passiven Sicherheitssysteme im Fahrzeug ist es wichtig, den genauen Zeitpunkt und den Ort eines Zusammenpralls zu erkennen. Nur so ist es möglich, den für die Insassen bestmöglichen Schutz zu bieten. Obwohl Laserscanner im Vergleich zu anderen Methoden bereits eine sehr detaillierte Objekterkennung ermöglichen, ist insbesondere eine frühzeitige Kollisionsberechnung stark fehlerbehaftet.
Durch Fahrzeug-Fahrzeug-Kommunikation (Car2Car) tauschen die Verkehrsteilnehmer wichtige Informationen in einem geographischen Gebiet aus. Das Basiskonzept der Car2Car-Kommunikation beruht auf dem Senden und Empfangen standardisierter Nachrichten über die Luftschnittstelle sowie der Interpretation der darin übertragenen Zustandsinformationen entweder zyklisch oder ereignisgesteuert. Hierzu können neben der eigenen GPS-Position auch Daten wie Fahrzeugtyp, Abmessungen, Fahrzeugmasse, Beladung und ähnliches zählen. Damit ist es einerseits möglich, die Messdaten des Laserscanners optimal an eine Box mit den tatsächlichen Fahrzeugabmessungen anzupassen und somit die Objektdetektion zu verbessern.
Andererseits erlaubt die kooperative Fahrzeugkommunikation eine Steigerung der Ortungsgenauigkeit der GPS-Position der beteiligten Fahrzeuge. Der wissenschaftliche Lösungsansatz dafür liegt in der Kopplung von Ortungsdaten GPS-basierter Systeme mit relativen Ortungsdaten der Car2Car-Kommunikationssignale.
Auswertungen zum Gesamtfahrzeugpraktikum

Auch in diesemJahr beteiligte sich das Labor für Kfz-Mechatronik wieder am Gesamtfahrzeugpraktikum der TU Dresden in Klettwitz. Neu dabei war die mobile Videomesstechnik, die eine zentimetergenaue Abstandsbestimmung erlaubt. In den Filmen sind vier ausgewählte Messungen zu sehen, die MatLab-daten sind in der Archivdatei zu finden.
Video_01 Video_02 Video_03 Video_04 Data
