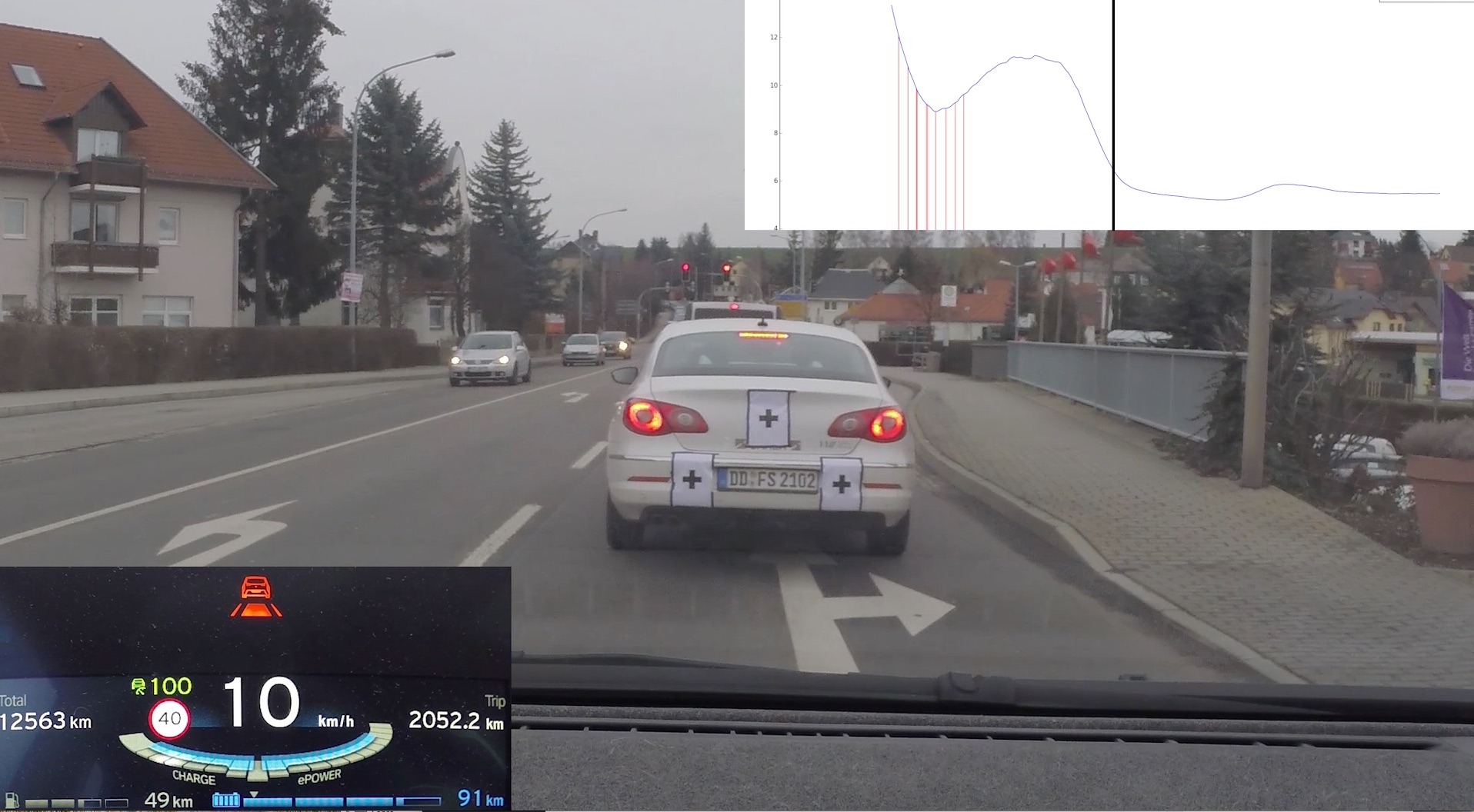
Die Testmessungen auf dem ITS World Congress 2015 in Bordeaux enthalten neben der direkten Fahrzeugkommunikation auch Informationen über die fahrspurselektiven Ampelphasen. Hierzu sind die Botschaftstypen MAP und SPaT vorgesehen. Das folgende Video (bitte Bild anklicken) zeigt die Visualisierung dieser Informationen sowie die Verfolgung des Testfahrzeuges aus dem Compass4D-Projekt.