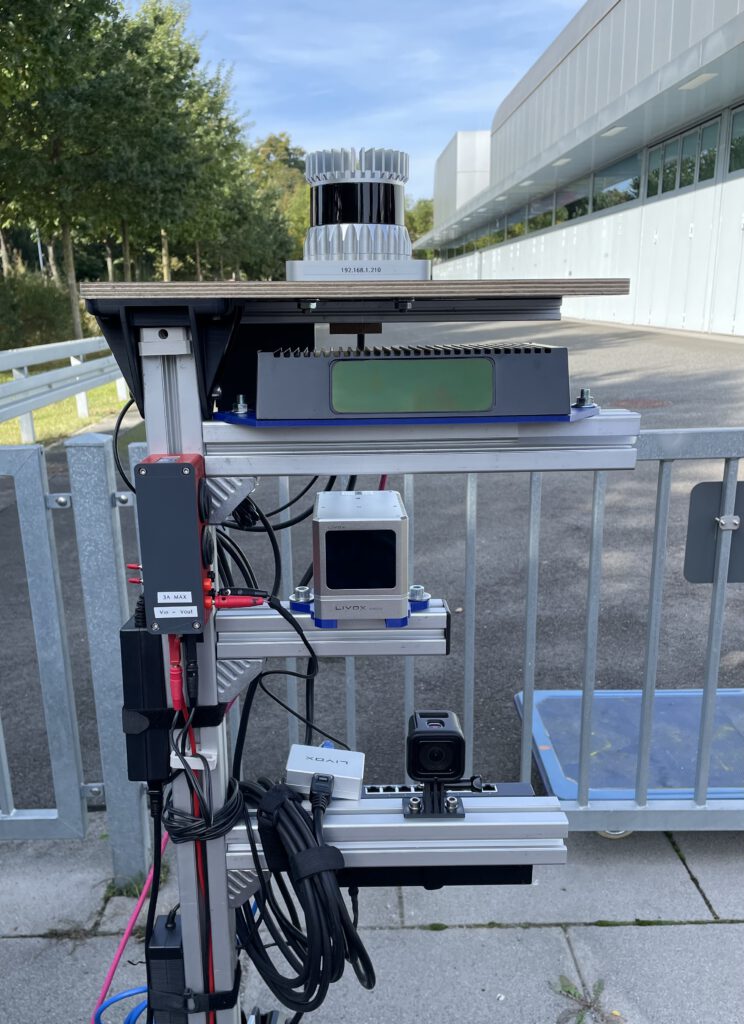
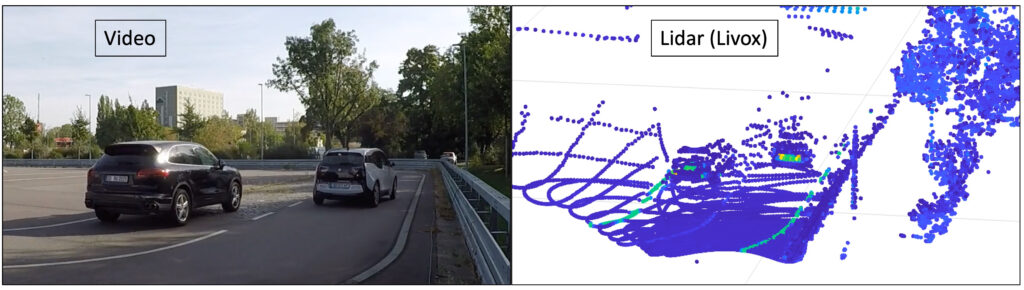
Für die Objekterkennung mittels KI sind Messungen von typischen Objekten in Verkehrssituationen notwendig. Eine erste Messkampagne wurde am 11.10.2023 auf dem HTW-Prüffeld mit 4 Fahrzeugen und 3 Probanden (natürlich die Bachelor-Studenten) erfolgreich durchgeführt. Mohammad Ammad konnte mit Unterstützung von Franziskus Mendt mit 3 verschiedenen Lidarsensoren die für den Lernprozess notwendigen Referenzdaten aufnehmen. Im nächsten Schritt erfolgt zunächst die manuelle Referenzierung und der Test an den aufgezeichneten Messdaten. Sollte hiermit bereits eine stabile Objektdetektion möglich sein, dann finden die nächsten Messungen im realen Straßenverkehr statt.
Object recognition using AI requires measurements of typical objects in traffic situations. A first measurement campaign was successfully carried out on October 11, 2023 on the HTW test area with 4 vehicles and 3 persons (of course the bachelor’s students). With the support of Franziskus Mendt, Mohammad Ammad was able to record the reference data necessary for the learning process using 3 different lidar sensors. The next step is manual referencing (labeling) and testing on the recorded measurement data. If stable object detection is already possible with this, then the next measurements will take place in real road traffic.