Einleitung
Die bisherigen Methoden der Spurerkennung für Fahrerassistenzsysteme wie bspw. Spurhalteassistent, basieren i. d. R. auf der Erfassung des Fahrzeugumfeldes mittels Kamerasensorik. Der Nachteil dieses Verfahrens besteht in der Abhängigkeit durch Umweltbedingungen und deren Einfluss auf die Güte der Bildinformation. Eine Steigerung der Redundanz bzw. ein Ersatz der Kamerasensorik könnte durch die Verwendung eines LiDAR (Light Detection and Ranging) erfolgen. Die Qualität der Informationen dieses Verfahrens hängen in geringerem Maße von Umweltbedingungen wie bspw. Belichtung oder Wetterverhältnissen ab als bei Kamerasensoren. Ein weitere Vorteil besteht darin, dass durch die Verwendung eines LiDAR eine Tiefeninformation (z) zu jedem detektierten Punkt (x, y) existiert. Zudem stellen viele Modelle weitere Informationen wie bspw. Intensitäten (wie stark wird der Punkt reflektiert) bereit. Anhand dieser Informationen kann anschließend ein Clustering (Einteilung in Gruppen mit bestimmten Merkmalen) erfolgen.
Zielstellung
Ziel dieses Konzeptes soll es sein, ein System zu entwickeln, welches das Clustering der Fahrspurinformationen (als x, y, z-Punkte) anhand von LiDAR Punktwolken (point cloud) ermöglicht und weiteren Systemen zur Verfügung stellt bzw. eine Fahrspur aus diesen gefilterten Informationen extrahiert. Weiterhin soll Anhand der Daten das GEwAF Konzept Simulative Generation of Training Data Sets for Neural Networks erweitert werden, indem für das Training des Netzes, anstelle der Bildinformationen der Kamera, die gefilterte Punktwolke des LiDARs verwendet wird.
Filterung der Point Cloud
Die Filterung der Point Cloud erfolgt mithilfe der Point Cloud Library (PCL). Im Idealfall sollte zunächst eine Ground Segmentation (Segmentierung der Straße) erfolgen. Bisher wurde der Progressive Morphological Filter sowie die Difference of Normals Based Segmentation untersucht. Da die optimalen Parameter für eine Segmetierung in Echtzeit mit beiden Verfahren bisher noch nicht ermittelt werden konnten, soll zunächst durch konventionelle Filterung das Clustering der Fahrspur erfolgen. Mittels Voxel Grid Filter wird ein Downsampling vorgenommen, um die Anzahl der Punkte zu reduzieren. Anschließend erfolgt die Applizierung eines Pass Through Filters zur Begrenzung der Bereiche (Region of Interest, ROI) sowie die Filterung nach Intensitäten und die Entfernung von Rauschen/Ausreißern durch einen Outlier Removal Filter.
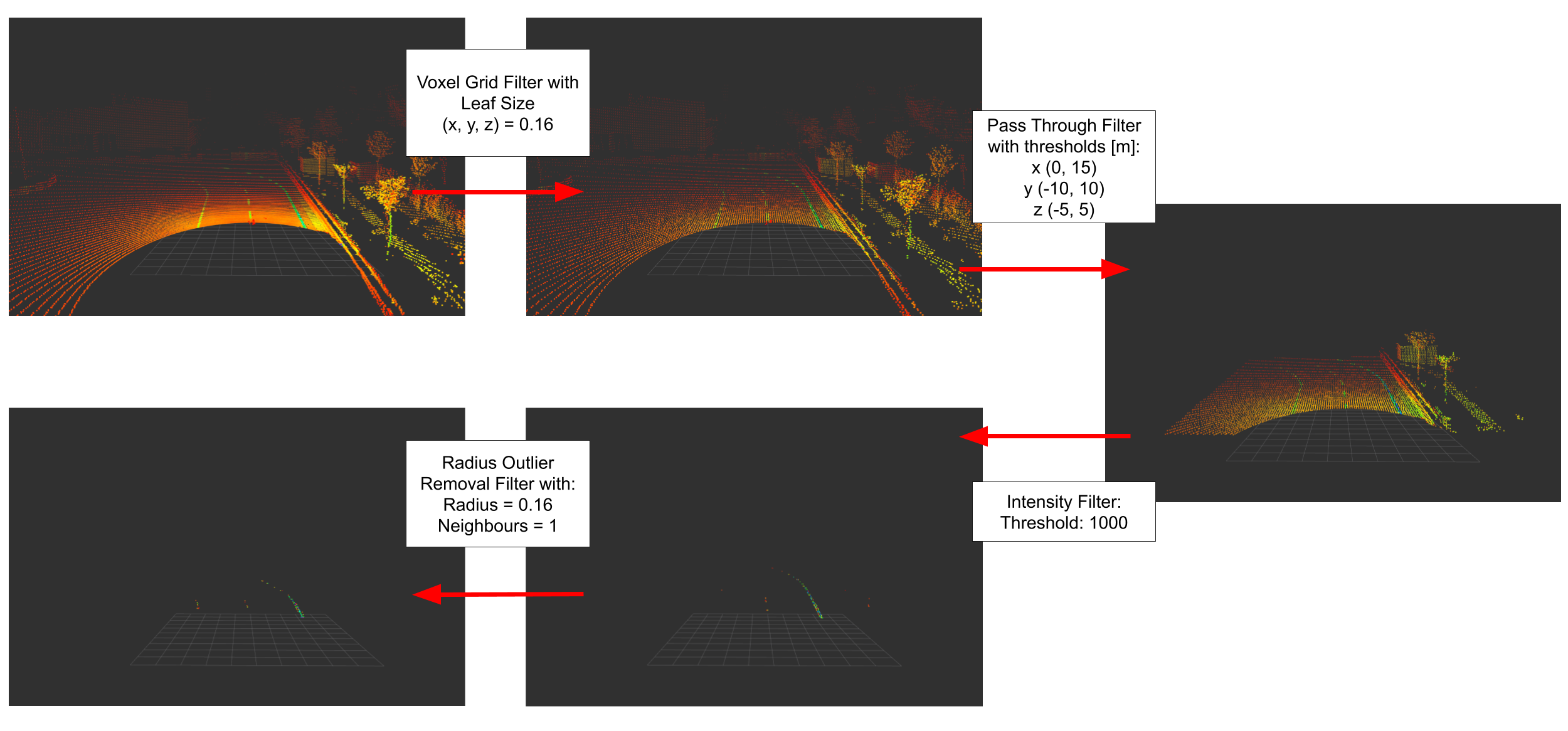
Eine detaillierte Beschreibung bzgl. Prinzip und Anwendung der Filter in Verbindung mit ROS, kann folgendem Blog-Eintrag entnommen werden: Applying Filters on LiDAR Point Clouds.