The first joint hackathon of the University of Primorska (UP FAMNIT) and the HTW Dresden (Mechlab) will take place from September 11th, 2024 to September 17th, 2024. In one week, new functions for driver assistance and vehicle automation are to be developed. The event will take place at the Izola campus in the Delta and Epsilon rooms and in the parking lot. The two planned functions are:
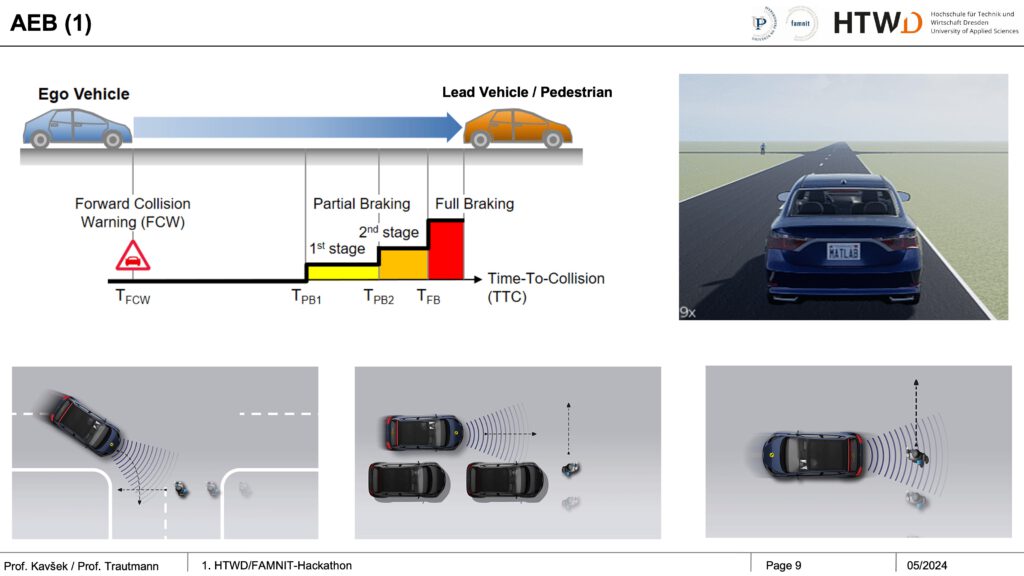
Development of a lidar-based Autonomous Emergency Brake – AEB (Example)
| Project | Description | Required programming skills |
| DriverInformation | Display concepts for the driver are developed based on a given Simulink model. Elements from the Simulink „Dashboard“ library can be used for a second display. There is also an LED strip (NeoPixel) that can be adapted for an individual driver information (e.g., distance basedcolors). | When using symbolic programming, no further programming knowledge is necessary. For complex control of the LED light strip (NeoPixel), knowledge of Arduino programming is required. Well suited for students who want to work with the human-machine interface. |
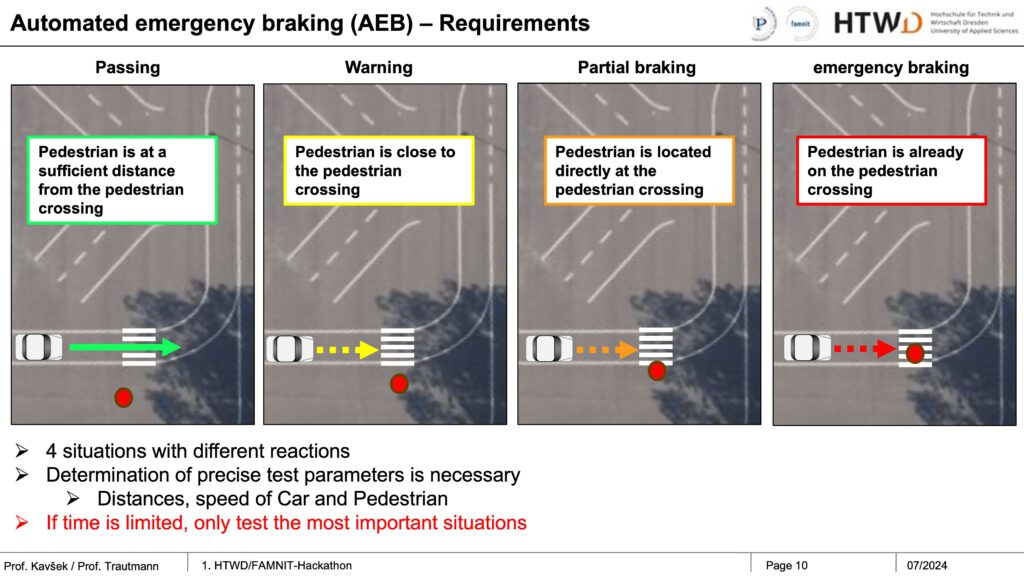
| Optimization of functions | There are several variants of object recognition with numerous parameters available. These can be optimized for individual target objects or situations. The systematic approach and situational adaptation of the algorithms are important here. | Knowledge of software architectures, handling multi-parameter algorithms and the evaluation of algorithms is an advantage. The adaptations can be realized in various programming languages. |
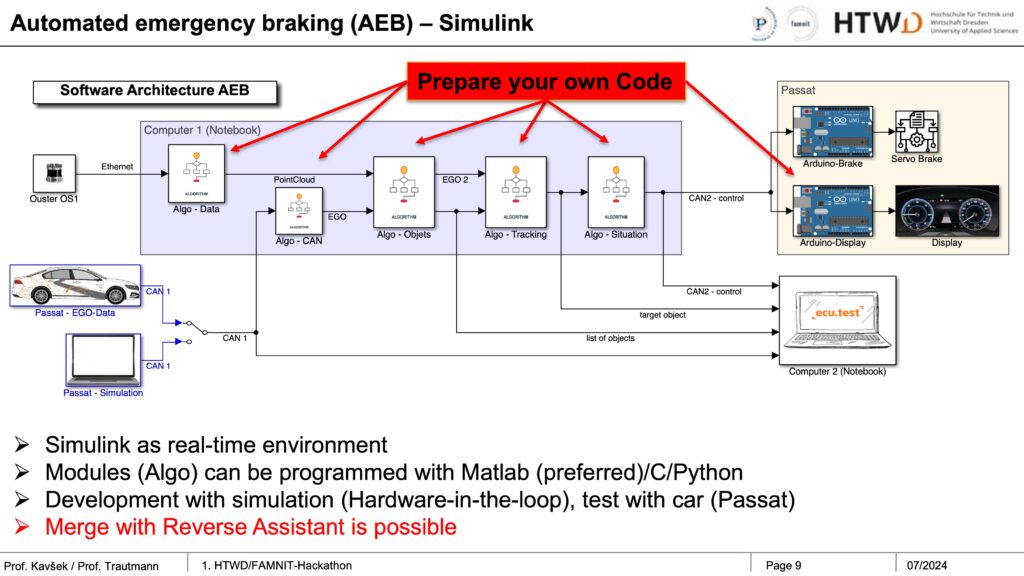
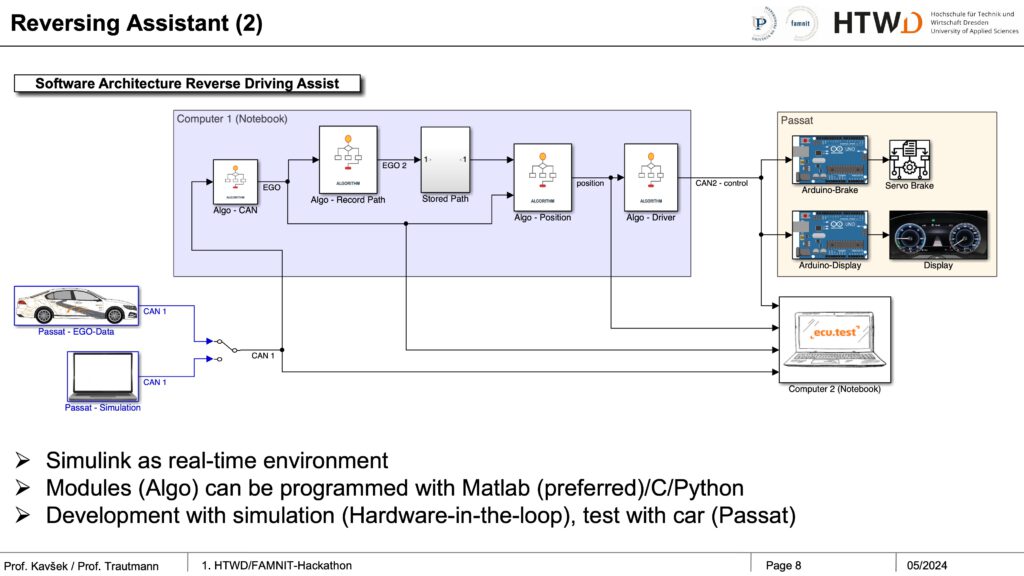
| Development of new algorithms | The software consists of several modules that are linked together via precisely defined interfaces. Each of these modules can be replaced by a new algorithm in various programming languages (C, C++, Python). | Good knowledge of the programming language to be used. |
| OpenCVIntegration | Simulink offers the integration of OpenCV modules, e.g., for camera-based object detection. This can also be integrated into the existing software architecture. A comparison with the results for lidar detection is then possible. | Good programming skills and experience in integrating open source software. |
| tbd. |
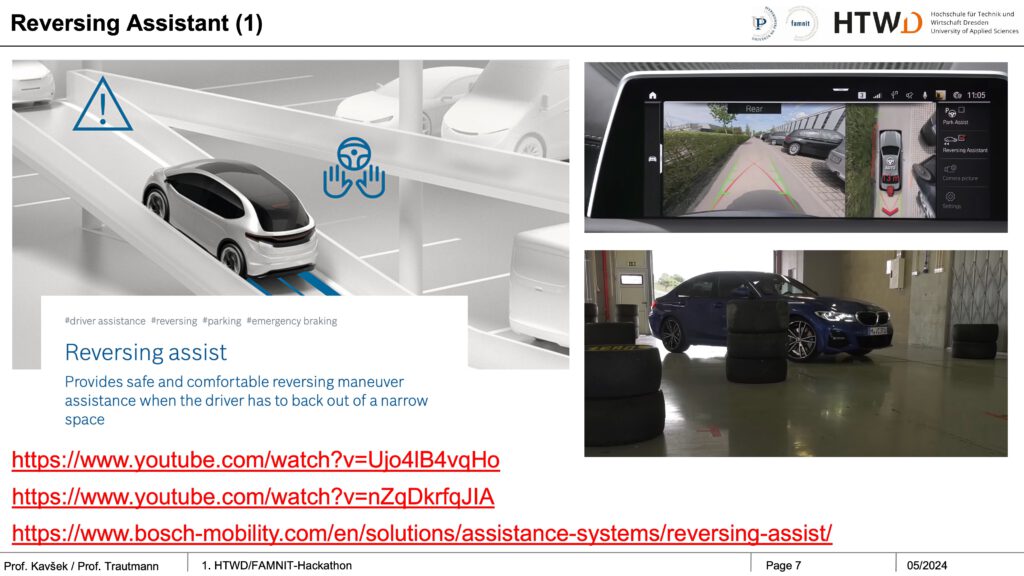
Development of a driver information for a Reversing Assistant (Example)
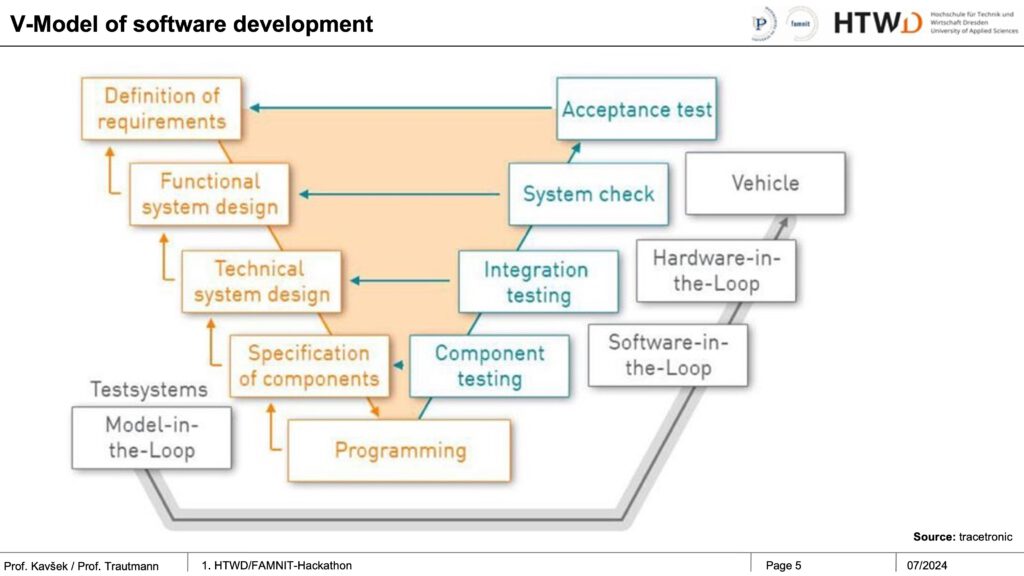
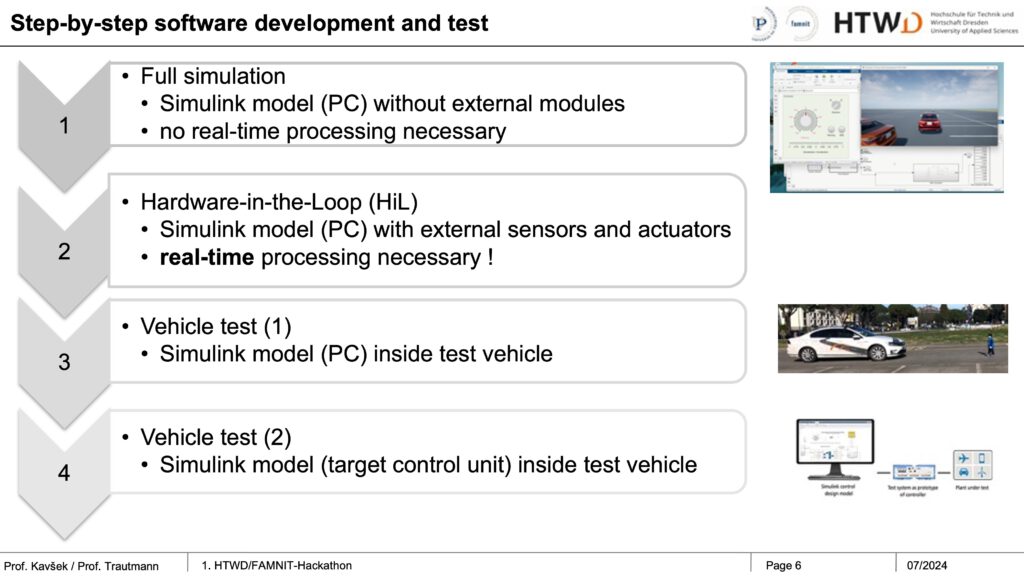
Development methodology
A step-by-step methodology is used to develop the functions. First, the basic function can be created and tested using a Simulink model (Model-in-the-Loop – MiL). This is then ported to the target hardware, initially outside the vehicle. This is simulated using a PC and connected via the CAN bus used in the vehicle (Hardware-in-the-Loop – HiL). Once the functions have been successfully tested, the driving tests are carried out in the test vehicle on the test site (road test). The following video shows a SiL-simulation for a two stages automatic emergency brake AEB (model available on request – email to trautmann@htw-dresden.de).
| Day | Content |
| 11.09.24 | – Introduction to automotive software development – Presentation of the technology and the projects – Division of projects and tasks |
| 12.09.24 | – Programming and testing |
| 13.09.24 | – Programming and testing- Presentation of interim status |
| 14.09.24 | – joint trip |
| 16.09.24 | – Programming and testing |
| 17.09.24 | – Programming and testing- Final presentation- Final discussion and preparation of the 2025 hackathon in Dresden |
Application for participation: informally by email to trautmann@htw-dresden.de